БИЛЕТ №6
6–1 Простейший усилительный каскад: схемы включения транзистора, принцип работы, обратная связь
Усиление электрических сигналов.
Классификация и основные характеристики усилителей. Входной и выходной импедансы. Эмиттерный повторитель. Параметрический стабилизатор. Генератор стабильного тока. Резистивно-ёмкостной каскад усилителя. Многокаскадный усилитель. Коррекция частотной характеристики. Избирательные усилители. Обратная связь в усилителях. Влияние обратной связи на основные характеристики усилителей. Усилители постоянного тока, дифференциальный каскад. Усилители мощности с трансформаторной связью и на основе комплиментарных транзисторов.
Операционные усилители. Основные схемы включения – инвертирующий, неинвертирующий и дифференциальный усилители. Коэффициент ослабления синфазного сигнала (КОСС). Фазовые и частотные характеристики операционных усилителей. Влияние отрицательной обратной связи на параметры и характеристики операционных усилителей. Операционный усилитель как базовый элемент функциональных устройств. Сумматор, интегратор, дифференциатор, логарифмический усилитель, релаксационный генератор, триггер Шмитта, фазовращатель, компенсационный стабилизатор напряжения.
Общие сведения о биполярном транзисторе
Основные определения
Биполярным транзистором
называется электропреобразовательный полупроводниковый прибор, имеющий в своей структуре два взаимодействующих p-n-перехода и три внешних вывода, и предназначенный, в частности, для усиления электрических сигналов. Термин «биполярный» подчеркивает тот факт, что принцип работы прибора основан на взаимодействии с электрическим полем частиц, имеющих как положительный, так и отрицательный заряд, – дырок и электронов. В дальнейшем для краткости будем его называть просто – транзистором.
Режимы работы транзистора
В зависимости от того, в каких состояниях находятся переходы транзистора, различают режимы его работы. Поскольку в транзисторе имеется два перехода (эмиттерный и коллекторный), и каждый из них может находиться в двух состояниях (открытом и закрытом), различают четыре режима работы транзистора. Основным режимом является активный режим
, при котором эмиттерный переход находится в открытом состоянии, а коллекторный – в закрытом. Транзисторы, работающие в активном режиме, используются в усилительных схемах. Помимо активного, выделяют инверсный режим
, при котором эмиттерный переход закрыт, а коллекторный – открыт, режим насыщения
, при котором оба перехода открыты, и режим отсечки
, при котором оба перехода закрыты.
Схемы включения биполярного транзистора
В большинстве электрических схем транзистор используется в качестве четырехполюсника, то есть устройства, имеющего два входных и два выходных вывода. Очевидно, что, поскольку транзистор имеет только три вывода, для его использования в качестве четырехполюсника необходимо один из выводов транзистора сделать общим для входной и выходной цепей. Соответственно различают три схемы включения транзистора: схемы с общей
базой
(ОБ), общим эмиттером
(ОЭ) и общим коллектором
(ОК). На рис. 3.3 показаны полярности напряжений между электродами и направления токов, соответствующие активному режиму в указанных схемах включения транзистора. Следует отметить, что токи транзистора обозначаются одним индексом, соответствующим названию электрода, во внешней цепи которого протекает данный ток, а напряжения между электродами обозначаются двумя индексами, причем вторым указывается индекс, соответствующий названию общего электрода (см. рис. 3.3). В схеме с общей базой
(см. рис. 3.3, а)

входной цепью является цепь эмиттера, а выходной – цепь коллектора. Схема ОБ наиболее проста для анализа, поскольку в ней каждое из внешних напряжений прикладывается к конкретному переходу: напряжение uЭБ
прикладывается к эмиттерному переходу, а напряжение uКБ
– к коллекторному. Следует заметить, что падениями напряжений на областях эмиттера, базы и коллектора можно в первом приближении пренебречь, поскольку сопротивления этих областей значительно меньше сопротивлений переходов. Нетрудно убедиться, что приведенные на рисунке полярности напряжений (uЭБ
<0; uКБ
>0) обеспечивают открытое состояние эмиттерного перехода и закрытое состояние коллекторного перехода, что соответствует активному режиму работы транзистора.
В схеме с общим эмиттером
(см. рис. 3.3, б) входной цепью является цепь базы, а выходной – цепь коллектора. В схеме ОЭ напряжение uБЭ
>0 прикладывается непосредственно к эмиттерному переходу и отпирает его. Напряжение uКЭ
распределяется между обоими переходами:
uКЭ
= uКБ
+ uБЭ
. Для того, чтобы коллекторный переход был закрыт, необходимо uКБ
= uКЭ
– uБЭ
> 0, что обеспечивается при uКЭ
> uБЭ
>
0.
В схеме с общим коллектором
(см. рис. 3.3, в) входной цепью является цепь базы, а выходной – цепь эмиттера.
Принцип работы биполярного транзистора
Рассмотрим в первом приближении физические процессы, протекающие в транзисторе в активном режиме, и постараемся оценить, каким образом эти процессы позволяют усиливать электрические сигналы.
Для простоты анализа будем использовать плоскую одномерную модель транзистора, представленную на рис. 3.4. Эта модель предполагает, что p-n – переходы транзистора являются
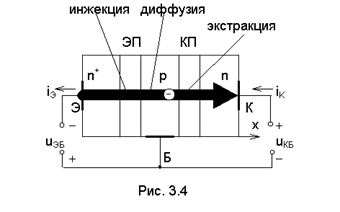
плоскими, и все физические величины в структуре, в частности, концентрации носителей заряда, зависят только от одной продольной координаты x, что соответствует бесконечным поперечным размерам структуры. С учетом того, что в реальной структуре транзистора (см. рис. 3.1) ширина базы значительно меньше поперечных размеров переходов, плоская одномерная модель достаточно хорошо отражает процессы, протекающие в транзисторе. Рассмотрим вначале статическую ситуацию, при которой на переходы транзистора от внешних источников питания подаются постоянные напряжения uЭБ
и uКБ
– см. рис. 3.4. Заметим, что приведенный на рисунке транзистор включен по схеме с общей базой. Напряжения uЭБ
<0 и uКБ
>0 обеспечивают открытое состояние эмиттерного перехода и закрытое состояние коллекторного перехода, что соответствует активному режиму работы транзистора. Через открытый эмиттерный переход протекают основные носители заряда. Как уже отмечалось в п. 3.1, из-за резкой асимметрии эмиттерного перехода инжекцию через него можно считать односторонней, то есть достаточно рассматривать только поток электронов, инжектируемых из эмиттера в базу – см. рис. 3.4. Этот поток очень сильно зависит от напряжения на эмиттерном переходе uЭБ
, экспоненциально возрастая с увеличением uЭБ
. Инжектированные в базу электроны оказываются в ней избыточными (неравновесными) неосновными носителями заряда. Вследствие диффузии они движутся через базу к коллекторному переходу, частично рекомбинируя с основными носителями – дырками. Достигнувшие коллекторного перехода электроны экстрагируются полем закрытого коллекторного перехода в коллектор. В связи с тем, что в коллекторном переходе отсутствует потенциальный барьер для электронов,
движущихся из базы в коллектор, этот поток в первом приближении не зависит от напряжения на коллекторном переходе uКБ
. Таким образом, в активном режиме всю структуру транзистора от эмиттера до коллектора пронизывает сквозной поток электронов, создающий во внешних цепях эмиттера и коллектора токи iЭ
и iК
, направленные навстречу движению электронов. Важно подчеркнуть, что этот поток электронов и, соответственно, ток коллектора iК
, являющийся выходным током транзистора, очень эффективно управляются входным напряжением uЭБ
и не зависят от выходного напряжения uКБ
.
Эффективное управление выходным током с помощью входного напряжения составляет основу принципа работы биполярного транзистора и позволяет использовать транзистор для усиления электрических сигналов.
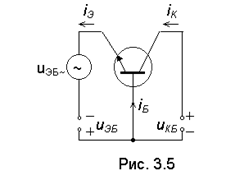
Схема простейшего усилительного каскада на транзисторе, включенном по схеме ОБ, приведена на рис. 3.5. По сравнению со схемой, приведенной на рис. 3.4, в эмиттерную цепь введен источник переменного напряжения uЭБ-
, а в коллекторную цепь включен нагрузочный резистор RК
. Переменное напряжение uЭБ –
наряду с напряжением, подаваемым от источника питания, воздействует на сквозной поток электронов, движущихся из эмиттера в коллектор. В результате этого воздействия коллекторный ток приобретает переменную составляющую iК–
,
которая благодаря очень высокой эффективности управления может быть значительной даже при очень маленькой величине uЭБ-
При протекании тока коллектора через нагрузочный резистор на нем выделяется напряжение, также имеющее переменную составляющую uКБ-
= iК –
RК
. Это выходное переменное напряжение при достаточно большом сопротивлении RК
может значительно превосходить величину входного переменного напряжения uЭБ –
(uКБ –
>>uЭБ-
)
. Таким образом, транзистор, включенный по схеме ОБ, усиливает электрические сигналы по напряжению. Что касается усиления по току, то рассмотренная схема его не обеспечивает, поскольку входной и выходной токи примерно равны друг другу (iЭ
iК
).
Примесная проводимость полупроводников
Собственная проводимость полупроводников обычно невелика из-за малого числа свободных электронов. Но проводимость полупроводников очень сильно зависит от примесей. Именно это свойство сделало проводники тем, чем они являются в современной технике. При наличие примесей в полупроводнике наряду с собственной проводимостью возникает дополнительная – примесная проводимость
. Изменяя концентрацию примеси, можно значительно изменить число носителей заряда того или иного знака.
Донорные примеси
При добавлении в полупроводник атомов пятивалентных элементов, например мышьяка, даже при очень малой их концентрации, число свободных электронов возрастает во много раз. Четыре валентные электрона участвуют в создании ковалентной связи, а пятый валентный электрон оказывается слабо связан с атомом. Он легко покидает атом мышьяка и становится свободным. Примеси, легко отдающие электроны и, следовательно, увеличивающие число свободных электронов, называются донорными примесями
. Поскольку полупроводники, обладающие донорными примесями имеют большее число электронов (по сравнению с числом дырок), их называют полупроводниками n-типа.
В полупроводнике n-типа электроны являются основными носителями заряда
, а дырки – неосновными
.
Акцепторные примеси
Если в качестве примеси использовать трехвалентный элемент, например индий, то характер проводимости полупроводника меняется. Теперь для образования ковалентных связей атому индия не хватает электрона. В результате образуется дырка. Такого рода примеси называют акцепторными
. При наличии электрического поля дырки начинают перемещаться, возникает дырочная проводимость. Полупроводники с преобладанием дырочной проводимости над электронной называют полупроводниками p-типа.
Основными носителями заряда в полупроводнике p-типа являются дырки, а неосновными – электроны.
Электрический ток через контакт полупроводников p- и n-типов
Наиболее важные свойства полупроводников происходят при контакте полупроводников n- и p-типов. Рассмотрим полупроводник, одна часть которого содержит донорные примеси, и поэтому является полупроводником n-типа, а другая – акцепторные примеси и представляет собой полупроводник p-типа. При включении полупроводника с p-n переходом в электрическую цепь так, чтобы потенциал полупроводника p-типа был положительным, а n-типа – отрицательным. При этом ток через p-n переход будет осуществляться основными носителями: из области n в область p – электронами, а из области p в область n – дырками. Следовательно, проводимость проводника велика. Такой переход называют прямым
. Вольтамперная характеристика прямого перехода изображена сплошной линией. Если переключить полюсы батареи, то переход через контакт будет осуществляться неосновными зарядами. Следовательно, проводимость будет маленькой. Такой переход называют обратным
. Вольтамперная характеристика обратного перехода изображена пунктирной линией.
Полупроводниковый диод.
Полупроводниковый диод – прибор, в котором используется один p-n
переход. Бывает точечным и плоскостным. Диод – представитель нелинейных проводников.
Транзистор.
Транзистор – полупроводниковый прибор, в котором использовано два p-n
перехода. Бывает точечным и плоскостным. Их можно использовать для усиления электрических сигналов.
6–2 Устройство синхронной машины и конструктивные особенности. Принцип действия синхронной машины в режиме двигателя и генератора.
V
-образные характеристики
Синхронные двигатели. Конструкция, принцип действия
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы).
В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор.
Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. 12.10а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещены катушки возбуждения 2. На рисунке 12.10б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2.
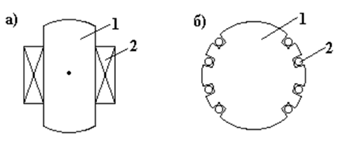
Рис. 12.10
Рассмотрим принцип работы синхронного двигателя на модели (рис. 12.11).
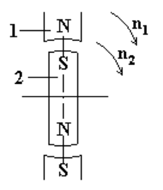
Рис. 12.11
|
Вращающееся магнитное поле статора представим в виде магнита 1. Намагниченный ротор изобразим в виде магнита 2. Повернем магнит 1 на угол α. Северный магнитный полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита 1 – северный полюс магнита 2. Магнит 2 повернется на такой же угол α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми, синхронными,
n2
= n1
. |
Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем.
Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора.
Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора.
С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма.
У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка.
Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Синхронные двигатели
В синхронном двигателе (СД) ротор вращается со скоростью вращения магнитного поля, т.е. wд
=wФ
или S=0. Механическая характеристика СД горизонтальна (g=¥). СД практически не используются в САР, т. к. регулирование скорости возможно только частотным методом. Кроме того, многие СД не имеют собственного пускового момента.
Обмотки статора СД создают вращающееся магнитное поле и по конструкции принципиально не отличаются от таковых в АСД. В зависимости от конструкции ротора, устройство и материал которого в значительной мере определяют природу возникновения электромагнитного момента и рабочие характеристики, СД подразделяются на три типа: с активным ротором (постоянными магнитами); реактивные; гистерезисные. Особую группу составляют двигатели дискретного действия – шаговые двигатели, которые в силу слежения ротора за магнитным полем следует отнести к синхронным двигателям.
Синхронные двигатели с активным ротором
Ротор таких СД состоит из двух основных частей: а) постоянных магнитов, создающих магнитный поток возбуждения ротора и обеспечивающих возникновение электромагнитного момента в синхронном режиме; б) короткозамкнутой обмотки типа «беличья клетка», обеспечивающей возникновение электромагнитного момента в процессе асинхронного пуска.
Электромагнитный момент создается в результате взаимодействия вращающегося поля статора с полем возбуждения ротора, которые вращаются с одинаковой скоростью.
Электромагнитный момент СД в синхронном режиме в случае симметричной магнитной цепи и при незначительном активном сопротивлении обмотки статора определяется уравнением, известным из общей теории синхронных машин активного типа [2]:
 (3.1) (3.1)

где m– число фаз статора; U– фазное напряжение на обмотке статора; Eо
– э.д.с., наводимая магнитным потоком ротора в обмотке фазы статора; wс
– синхронная угловая скорость; Xс
– индуктивное сопротивление обмотки статора; q – сдвиг по фазе между векторами U и Eо
.
Угол q в синхронном режиме зависит от момента нагрузки на валу двигателя. Угловая характеристика, соответствующая уравнению (3.1), изображена на рис. 3.1. сплошной линией.В реальных СД с постоянными магнитами магнитная система несимметрична. Активное сопротивление обмотки статора СД небольшой мощности, обычно используемых в САУ, соизмеримо с индуктивными сопротивлениями. Поэтому существенная часть потребляемой мощности теряется на активном сопротивлении обмотки статора.
Оба указанных фактора влияют на значение электромагнитного момента Mс
и его зависимость от угла q. Эта зависимость приведена на рис. 3.1. пунктиром.
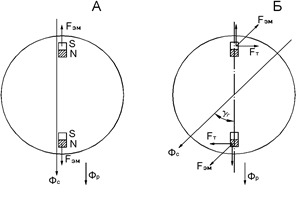
У СД с постоянными магнитами применяют асинхронный метод пуска. Вращающееся магнитное поле статора во взаимодействии с токами, наведенными в короткозамкнутой обмотке ротора, создает асинхронный момент Mа
. Особенность пуска таких двигателей заключается в том., что поток от постоянных магнитов ротора при вращении ротора наводит в обмотках статора э.д.с., частота которой не равна частоте напряжения питания. Под действием э.д.с. в цепи обмоток статора проходят токи, которые во взаимодействии с вызвавшим их потоком ротора создают тормозной момент Mт
. Для уменьшения тормозного момента Mт
необходимо снижать поток постоянных магнитов ротора.
Оптимальной является такая степень возбуждения ротора, которая обеспечивает наилучшие характеристики в синхронном режиме при заданных пусковых характеристиках.
В мощных СД может использоваться электромагнитное возбуждение ротора. На обмотку ротора через коллектор подается постоянное напряжение, создающее магнитное поле возбуждения ротора. При пуске постоянное напряжение отключается от обмотки ротора, которая на время пуска подключается к сопротивлению. Пусковой момент создается обмоткой типа «беличья клетка».
Такие СД имеют наиболее оптимальные рабочие и пусковые характеристики. Однако они практически не применяются в САУ, где энергетические характеристики не являются решающими. Основные причины этого заключаются в следующем:
1) для работы двигателя необходимы два источника питания: переменного и постоянного тока;
2) скользящий контакт кольца-щетки снижает надежность двигателя и усложняет его конструкцию;
3) требуется специальная пусковая схема, отключающая на период разгона обмотку ротора от источника постоянного тока и подключающая ее к внешнему сопротивлению.
Реактивные синхронные двигатели
Ротор реактивных СД является невозбужденным, но его магнитное сопротивление непостоянно вдоль окружности воздушного зазора.
Принцип действия реактивного СД рассмотрим на статической модели, представленной на рис. 3.2. Вращающееся магнитное поле статора Фd
заменим полем постоянного магнита. Угол между продольной осью ротора в и осью магнитного потока Фd
обозначим g.
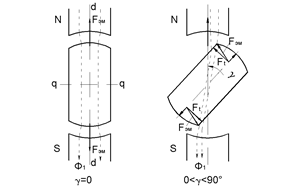
В том случае, когда g =0 (рис. 3.2, а), магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются. Реактивный вращающий момент Mр
=0. Ротор находится в положении устойчивого равновесия. Если принудительно повернуть на угол g по часовой стрелке (рис. 3.2, б), то магнитные силовые линии изогнутся. Деформация магнитного поля вследствие упругих свойств силовых линий вызовет реактивный вращающий момент, стремящийся повернуть ротор против часовой стрелки. Очевидно, что при наличии внешнего момента Mн
, ротор установится в такое положение, когда Mр
= Mн
.
В реальных реактивных СД обмотки статора создают вращающееся магнитное поле, а ротор увлекается реактивным моментом вслед за полем и вращается с угловой скоростью поля.
Важной характеристикой реактивного СД является удельный реактивный момент, который определяется как
 при g =0. при g =0.
Величина удельного момента зависит от формы ротора и величины потока возбуждения в квадрате.
Реактивный СД не имеет собственного пускового момента, поэтому у таких двигателей применяется асинхронный метод пуска. В качестве пусковой обмотки на роторе служит либо обмотка типа «беличья клетка», либо алюминиевые части ротора. Когда скорость wд
достигает величины, близкой к синхронной (~0,95wс
), явнополюсный ротор взаимодействует с полем и втягивается в синхронизм. Ток коротко замкнутой обмотки падает до 0.
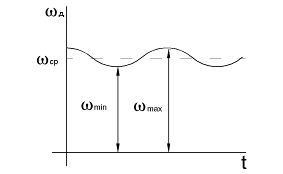
Характерной особенностью реактивных СД является нестабильность вращения ротора при постоянстве средней скорости вращения. Мгновенная угловая скорость ротора может колебаться в пределах одного оборота относительно средней скорости (рис. 3.3). Это явление присуще и другим СД и называется качанием ротора. Оно нежелательно, т. к. дает ошибку в положении ротора относительно расчетного, что недопустимо при использовании СД в точных системах передачи угловых перемещений.Причиной этого явления является нестабильность реактивного момента и момента нагрузки. Существуют внешние и внутренние (конструктивные) причины, приводящие к нестабильности моментов: эллиптичность вращающегося магнитного поля; неравномерность магнитной проводимости по различным осям двигателя; неточная балансировка ротора; тормозные моменты в подшипниках; колебания и несинусоидальность напряжения питания; неравномерность нагрузки на валу двигателя.
К уменьшению амплитуды качаний ротора приводят следующие факторы: увеличение удельного реактивного момента; улучшение технологии изготовления двигателей; использование электрического демпфирования. Так коротко замкнутая пусковая обмотка является одновременно и демпфирующей, т. к. при качаниях ротора относительно поля в ней наводятся токи, создающие момент, препятствующий качаниям ротора.
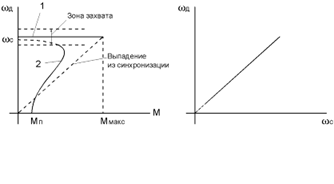
На рис. 3.4 показаны механическая (а) и регулировочная (б) характеристики реактивного СД. Механическая характеристика горизонтальна вплоть до величины максимального момента Mмакс
, при котором двигатель выпадает из синхронизма и останавливается. На рис. 3.4 также показана механическая характеристика для пусковой обмотки (кривая 2).
Регулировочная характеристика линейна и идет из начала координат. Начальный участок показан пунктиром из-за трудности реализации низких угловых скоростей.Реактивные СД имеют много разновидностей, которые можно разделить на три основные группы: 1) реактивные СД с распределенными обмотками статора; 2) редукторные реактивные СД; 3) реактивные СД с сосредоточенными обмотками статора (будут рассмотрены в разделе «шаговые двигатели»).
Реактивные синхронные двигатели с распределенными обмотками статора.
Статор таких двигателей принципиально ничем не отличается от статора обычных синхронных и асинхронных машин. Его задача – создать вращающееся магнитное поле.

Ротор – явнополюсный. На рис. 3.5 изображены конструкции явнополюсных роторов. На рис. 3.5, а, б ротор выполнен из электротехнической стали. В нем находится «беличья клетка» для асинхронного пуска двигателя. Различная магнитная проводимость достигается за счет внешних (рис. 3.5, а) или внутренних пазов (рис. 3.5, б) в магнитном материале. В конструкции на рис. 3.5, в различная магнитная проводимость ротора достигается за счет выполнения его из двух разнородных по магнитным свойствам материалов.
Реактивные СД имеют невысокие энергетические показатели. Для рассматриваемой конструкции к.п.д. лежит в диапазоне от 5% до 40%.
Реактивный редукторный двигатель.
Редукторные СД позволяют получить пониженную синхронную скорость вращения при питании от стандартной сети без механического редуктора.
Статор и ротор такого двигателя имеют зубцы, как показано на рис. 3.6. Числа зубцов статора zс
и ротора zр
различны, причем обычно zр
>zс
. На статоре уложена обмотка, создающая вращающееся магнитное поле Фс
.
Если в данный момент времени поток Фс
занимает положение А, то реактивный вращающий момент заставит ротор повернуться в положение наибольшей магнитной проводимости, т.е. напротив статорных зубцов 1 и 4 будут находиться роторные зубцы 1¢ и 5¢. При перемещении потока Фс
в положение Б, т.е. на угол 3600
/zс
, ротор под действием реактивного момента встанет в положение, когда напротив зубцов статора 2 и 5 встанут зубцы ротора 2¢ и 6¢, т.е. ротор повернется на угол 3600
/zс
-3600
/zр
.Следовательно, угловая скорость ротора wд
меньше угловой скорости поля статора wс
в  раз. Коэффициент редуцирования скорости раз. Коэффициент редуцирования скорости  . Для рассмотренного случая (рис. 3.6) Kр
=4. Если zр
=100 и zc
=98, то Kр
=50. Однако следует иметь ввиду, что число зубцов ограничивается технологическими соображениями. . Для рассмотренного случая (рис. 3.6) Kр
=4. Если zр
=100 и zc
=98, то Kр
=50. Однако следует иметь ввиду, что число зубцов ограничивается технологическими соображениями.
Реактивные редукторные СД имеют недостатки, характерные для всех реактивных СД – малый вращающий момент, низкие энергетические показатели и большую массу.
Синхронные гистерезисные двигатели
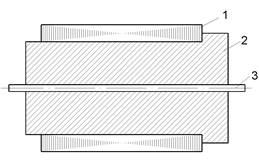
В синхронных гистерезисных двигателях (СГД) вращающий момент возникает за счет гистерезиса при перемагничивании ротора. Статор СГД обычный, служит для создания вращающегося магнитного поля. Ротор выполнен из магнитотвердого материала. Используются материалы типа викалоя и ални с широкой петлей гистерезиса. Ротор выполняется сборным: на немагнитной или магнитомягкой втулке 2 напрессовано кольцо из магнитотвердого материала 1 (рис. 3.7). При ограниченной мощности возбуждения оптимальное по намагничиванию использование магнитотвердого материала кольца и наилучшие энергетические показатели достигаются при определенном соотношении между толщиной кольца и диаметром ротора.
Для выяснения природы гистерезисного момента рассмотрим физические процессы, происходящие в роторе при асинхронном вращении, т.е. когда материал ротора непрерывно перемагничивается. На рис. 3.8, а магнитный поток статора Фс
занимает положение А, а элементарные магнитики ротора ориентированы вдоль этого потока. Силы взаимодействия Fэм
элементарных магнитиков с потоком статора Фс
направлены вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение Б в том же направлении будут поворачиваться и элементарные магнитики (рис. 3.8, б). Однако вследствие явления гистерезисного запаздывания магнитики не повернутся на тот же угол, что и поток Ф1
, а будут отставать от него на угол гистерезисного запаздывания gг
.
Таким образом между направлением потока статора Ф1
и направлением намагниченности ротора образуется угол gг
, который определяется коэрцитивной силой материала ротора. Силы взаимодействия Fэм
будут иметь тангенциальные составляющие Ft
, которые и создадут гистерезисный момент асинхронного режима Mг
. Этот момент пропорционален модулю векторного произведения пространственных векторов магнитного потока ротора Фр
, образованного элементарными магнитиками, и м.д.с. статора Fс
, которые вращаются со скоростью поля со сдвигом на угол gг
:
Mг
=kFс
Фр
singг
, (3.2)
где k– конструктивный коэффициент.
Пространственный угол gг
не зависит от угловой скорости ротора и зависит только от коэрцитивной силы материала ротора, при которой начинается его перемагничивание (изменение направления поля элементарных магнитиков). Поэтому не зависит от угловой скорости ротора и вращающий гистерезисный момент Mг
.
Механическая характеристика идеального гистерезисного двигателя приведена на рис. 3.9. Характеристика абсолютно жесткая, а пусковой момент равен моменту при синхронной угловой скорости (Mп
=Mг
).
В синхронном режиме магнитное поле статора и ротор вращаются с одинаковой угловой скоростью и перемагничивания материала ротора не происходит. Магнитный поток ротора Фр
сохраняется вследствие остаточного магнетизма и вращается вместе с ротором с синхронной угловой скоростью. Двигатель работает как обычный СД с постоянными магнитами на роторе.Момент двигателя в синхронном режиме равен моменту нагрузки Mн
, но не может превышать величины Mг
. В зависимости от момента нагрузки Mн
на валу двигателя изменяется угол отставания g оси поля ротора от оси поля статора. При Mн
=0 (холостой ход) g=0. При Mн
=Mг
(максимальное значение момента) g=gг
.При дальнейшем увеличении момента Mн
начинается перемагничивание материала ротора, а вращающий момент остается постоянным, равным Mг
. При Mн
>Mг
ротор двигателя выходит из синхронизма и останавливается.
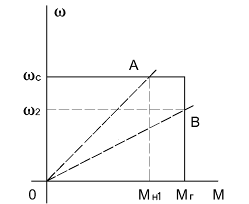
В том случае, если момент нагрузки зависит от скорости вращения ротора Mн
=f(w), то возможен как синхронный, так и асинхронный режим работы двигателя. Если момент нагрузки во всем диапазоне скоростей на превышает Mг
(прямая 1 на рис. 3.9), то установится синхронная скорость wс
, и вращающий момент будет соответствовать точке А на механической характеристике. Если изменение момента нагрузки идет по прямой 2, то установится асинхронная скорость w2
<wс
, а момент двигателя будет равен Mг
. Следует отметить, что использование гистерезисного двигателя в асинхронном режиме неэкономично вследствие больших потерь на перемагничивание ротора, особенно при больших скольжениях.
Синхронные гистерезисные двигатели обладают рядом ценных качеств. Они развивают большой пусковой момент и способны входить в синхронизм плавно, без рывков благодаря постоянному значению пускового момента во время пуска при изменении w от 0 до wс
. Потребляемый ток незначительно (на 20–30%) изменяется при изменении режима работы от короткого замыкания (w=0) до холостого хода (Mн
=0, w=wс
), что позволяет эффективно использовать гистерезисные двигатели в повторно-кратковременном режиме. Гистерезисные двигатели просты по конструкции и надежны в эксплуатации.
Энергетические показатели гистерезисных двигателей не высоки, т. к. магнитный поток ротора является вторичным, т.е. наведенным рабочим потоком статора, и режим работы такого двигателя соответствует режиму синхронной машины с недовозбуждением. К.п.д. гистерезисного двигателя можно повысить путем подмагничивания ротора с помощью кратковременного повышения значения магнитного потока статора за счет увеличения подводимого к нему напряжения.
Шаговые синхронные двигатели
Шаговые двигатели (ШД) преобразуют команду, заданную в виде импульсов, в фиксированное угловое или линейное перемещение. ШД являются дискретными преобразователями и широко используются при управлении с использованием цифровой вычислительной техники.
Шаговые двигатели можно подразделить на три основные конструктивные группы: с постоянными магнитами (активный ротор), реактивные и индукторные.
Шаговые двигатели могут иметь различное число фаз, но наибольшее распространение получили двух-, трех- и четырехфазные ШД. Обмотка фазы статора либо целиком является обмоткой управления, либо ее разделяют на две (выводом от средней точки), магнитные оси которых сдвинуты в пространстве на 1800
.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или разнополярных импульсов.
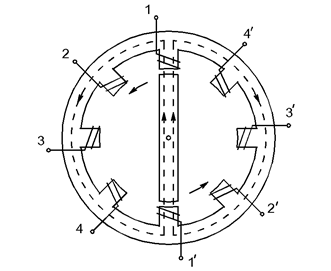
Принцип действия ШД рассмотрим на примере конструкции, представленной на рис. 3.10. Статор имеет явновыраженные полюса (зубцы), на которых расположены обмотки управления. В рассматриваемом примере ШД имеет 4 фазы. Каждая фаза состоит из двух обмоток, расположенных на противоположных полюсах. Начало обмоток обозначено цифрами 1, 2, 3, 4. Конец обмоток – цифрами 1¢, 2¢, 3¢, 4¢.
Ротор явнополюсный, и может быть как намагниченным (активного типа), так и намагниченным (как у индукторных СД). Рассмотрим сначала не намагниченный ротор.
При подаче импульса тока на обмотку 1–1¢ ротор за счет реактивного момента встанет напротив соответствующих зубцов (полюсов) статора. Если затем подать импульс на обмотку 2–2¢, то ротор повернется против часовой стрелки на угол 450
и встанет напротив соответствующих зубцов. Если подавать импульсы на обмотки в последовательности 1–2–3–4, то ротор будет вращаться против часовой стрелки. Для вращения по часовой стрелке последовательность подключения фаз должна быть 1–4–3–2. При пассивном роторе импульсы управления могут быть однополярными. Если подать импульсы управления на две соседние фазы одновременно (например, 1 и 2), то ротор займет промежуточное положение между зубцами 1 и 2. Это явление называется электрическим дроблением шага.
 |
Если используется ротор активного типа, то импульсы управления должны быть разнополярными. В рассматриваемом примере для вращения против часовой стрелки подаются положительные импульсы в последовательности 1–2–3–4 (поворот на первые 1800
), а затем отрицательные в последовательности 1–2–3–4 (вторые 1800
). При вращении по часовой стрелке последовательность 1–4–3–2–1–4–3–2 (поворот на 3600
). Цифра с чертой означает, что на данную фазу подается отрицательный импульс. Управление разнополярными импульсами усложняет схему управления двигателем, поэтому в ШД чаще используется пассивный ротор.
В реактивных ШД ротор так же как и статор имеет зубчатую конструкцию. На рис. 3.11 статор имеет 12 зубцов, а ротор – 16 зубцов. Обмотки 1–4–7–10 соединены последовательно и составляют одну фазу (Ф1
). Аналогично обмотки 2–5–8–11 и 3–6–9–12 составляют фазы Ф2
и Ф3
. Таким образом имеется всего 3 фазы.
При подаче импульса на фазу Ф1
магнитный поток замыкается, как показано на рис. 3.11. Напротив зубцов статора 1–4–7–10 стоят зубцы ротора 1¢-5¢-9¢-13¢. Если следующий импульс подать на фазу Ф2
(2–5–8–11), то магнитный поток должен найти другой путь. Наименьший зазор оказывается между зубцами 2–5–8–11 статора и зубцами 2¢-6¢-10¢-14¢ ротора соответственно. Появится реактивный момент, который повернет ротор так, что указанные зубцы ротора и статора окажутся напротив друг друга. Угол поворота ротора составит 300
-22,50
=7,50
. При подаче импульса на Ф3
ротор повернется еще на 7,50
и т.д. Подавая импульсы тока в последовательности 1–2–3–1, мы получим вращение ротора шагами по часовой стрелке. Для вращения ротора против часовой стрелки импульсы нужно подавать на фазы в последовательности 1–3–2–1.
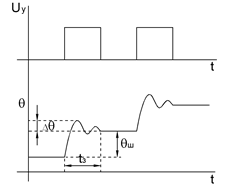
Угол поворота на один шаг определяется числом фаз Nф
и числом зубцов ротора Nр
:
 . (3.3) . (3.3)
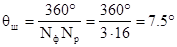
Существует много конструктивных разновидностей ШД. Если статор и ротор развернуть в линию, то получится линейный ШД (рис. 3.12). Очевидно, что в этом случае линейное перемещение ротора будет ограничено его длиной.
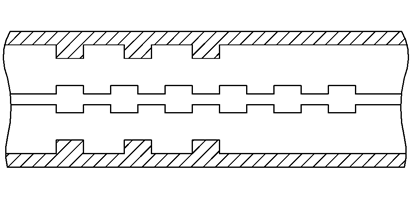
Индукторные ШД отличаются от рассмотренных реактивных тем, что в них применяется подмагничивание ротора, например, униполярным постоянным магнитным потоком со стороны статора (рис. 3.13). В торце двигателя на статоре расположен кольцевой магнит с осевой намагниченностью. Постоянный магнитный поток подмагничивания Фп
по ротору замыкается в осевом направлении, а в воздушном зазоре между ротором и статором – в радиальном. При этом увеличивается синхронизирующий момент, улучшаются энергетические и динамические характеристики ШД.Режим работы ШД в значительной мере определяется частотой следования управляющих импульсов f.
Статический режим (f=0) соответствует прохождению постоянного тока по обмоткам управления, создающим неподвижное магнитное поле. Основной характеристикой этого режима является зависимость статического синхронизирующего момента Mс
от угла рассогласования q между продольной осью ротора и м.д.с. статора (моментная характеристика). На рис. 3.14 показаны положения ротора для различных значений q. При q=0 синхронизирующий момент Mс
=0. При q¹0 реактивный синхронизирующий момент Mс
¹0. Он стремится повернуть ротор в согласованное положение. Если угол рассогласования равен половине угла между зубцами ротора  q= q= qр
, то на каждый зубец действуют равные по величине и противоположные по направлению силы. Результирующий момент Mс
=0. Таким образом в диапазоне изменения q от 0 до qр
синхронизирующий момент имеет максимум. Зависимость Mс
=f(q) показана qр
, то на каждый зубец действуют равные по величине и противоположные по направлению силы. Результирующий момент Mс
=0. Таким образом в диапазоне изменения q от 0 до qр
синхронизирующий момент имеет максимум. Зависимость Mс
=f(q) показана
Под действием момента нагрузки на валу ШД ротор отклонится от согласованного положения на угол dq. Если Mн
превысит Mмакс
, то будет потеряна синхронизация между положением ротора и управляющими импульсами. Поэтому для нормальной работы ШД всегда должно выполняться условие Mн
< Mмакс
.
Для определения пускового момента на рис. 3.15 приведена пунктиром моментная характеристика для второй фазы. При подаче импульса на вторую фазу и указанном угле рассогласования dq момент Mп
, показанный на рисунке, и будет являться пусковым. Очевидно, что для него также должно выполняться требование Mп
>Mн
, иначе произойдет потеря синхронизации. Максимально допустимое значение момента нагрузки Mн макс
определяется точкой пересечения моментных характеристик для первой и второй фазы.
При отработке ШД импульсов управления возможны два режима: пошаговый и скоростной.
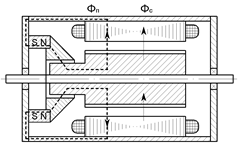
Пошаговый режим соответствует частоте управляющих импульсов, при которой переходный процесс, чаще всего колебательный, на каждом шаге заканчивается к началу следующего шага, т.е. угловая скорость ротора в начале каждого шага равна нулю (рис. 3.16). Основными показателями ШД в пошаговом режиме являются: а) перерегулирование Dq, т.е. максимальное отклонение ротора от нового устойчивого положения при переходном процессе; б) максимальное значение мгновенной угловой скорости ротора q в процессе шага; в) время затухания свободных колебаний ротора на одном шаге tз
.
Средняя угловая скорость ротора определяется выражением
 (3.4) (3.4)
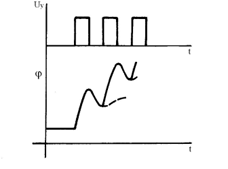 Скоростной режим работы ШД соответствует частоте управляющих импульсов, при которой tз
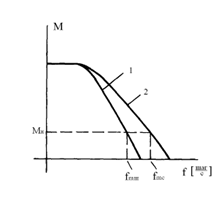
больше периода следования импульсов (рис. 3.17). Устойчивая работа ШД в таком режиме зависит от момента нагрузки на валу двигателя. Обычно в паспортных данных ШД приводится зависимость допустимого момента нагрузки от частоты управляющих импульсов для пошагового и для скоростного режимов (рис. 3.18). При переходе от пошагового режима к скоростному частоту импульсов управления нельзя изменять скачком, т. к. из-за влияния момента инерции ротора и нагрузки в переходном режиме возможны пропуски импульсов управления (потеря синхронизации). Частота импульсов управления должна изменяться постепенно, как при переходе от пошагового режима к скоростному, так и наоборот (рис. 3.19).

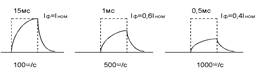
Одной из причин ограничения скорости работы ШД является постоянная времени обмоток управления  , где Lф
и Rф
– индуктивность и активное сопротивление обмотки управления (фазы). При большой частоте fимпульсов управления ток в обмотке не успевает нарасти до номинального значения. На рис. 3.20 показана форма тока в обмотке управления с Tф
=10-3
с при различной частоте управляющих импульсов. Так при частоте 500 шагов в секунду ток в обмотке за время импульса достигает значения 0,6 Iном
, а при 1000 шагов в секунду – 0,4 Iном
. , где Lф
и Rф
– индуктивность и активное сопротивление обмотки управления (фазы). При большой частоте fимпульсов управления ток в обмотке не успевает нарасти до номинального значения. На рис. 3.20 показана форма тока в обмотке управления с Tф
=10-3
с при различной частоте управляющих импульсов. Так при частоте 500 шагов в секунду ток в обмотке за время импульса достигает значения 0,6 Iном
, а при 1000 шагов в секунду – 0,4 Iном
.
Для уменьшения постоянной времени используется добавочное сопротивление, включаемое последовательно с обмоткой управления. Соответственно увеличивается амплитуда импульсов управления. Так при Rд
=4Rф
и Uимп
=5Uном
ток в обмотке управления при скорости 100 шагов в секунду будет достигать 0,9 Iном
. Соответственно улучшается и частотная характеристика. На рис. 3.21 показано улучшение зависимости M=f(f) для одного из двигателей при включении добавочного сопротивления Rд
=4Rф
.6–3 Автоматическое повторное включение(АПВ): Назначение и сущность АПВ, требования, предъявляемые к защите
Автоматическое повторное включение
Автоматическое повторное включение
(АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает.
А. п. в. выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают А. п. в. при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т.п. Эффективность А. п. в. тем выше, чем быстрее следует оно за аварийным отключением, т.е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла А. п. в. В электрических системах применяют однократное А. п. в. – с одним циклом, двукратное – при неуспешном первом цикле, и трёхкратное – с тремя последовательными циклами. Цикл А. п. в. – время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя – состоит из времени отключения и включения выключателя и времени срабатывания устройства А. п. в. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного А. п. в. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов А. п. в., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5–1,5 сек,
2-го – от 10 до 15 сек,
3-го – от 60 до 120 сек.
Наиболее распространено однократное А. п. в., обеспечивающее на воздушных линиях высокого напряжения (110 кв
и выше) до 86%, а на кабельных линиях (3–10 кв) –
до 55% успешных включений. Двухкратное А. п. в. обеспечивает во втором цикле до 15% успешных включений. Третий цикл увеличивает число успешных включений всего на 3–5%. На линиях электропередачи высокого напряжения (от 110 до 500 кв
) применяется однофазовое А.п. в.; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение А. п. в. экономически выгодно, т. к. стоимость устройств А. п. в. и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
6-4
Условные обозначения, применяемые в схемах: стандартизация, способы построения
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Условные буквенно-цифровые обозначения (в дальнейшем условные обозначения) предназначены:
а) для записи в сокращенной форме сведений об элементах,
устройствах и функциональных группах (в дальнейшем объекты)
изделия, показанных в конструкторских документах в графической
форме;
6) для ссылок на соответствующие объекты в текстовых конструкторских документах;
в) для нанесения непосредственно на изделие (если это предусмотрено в конструкции изделия).
1.2. В зависимости от назначения и характера передаваемой информации устанавливаются следующие типы условных обозначений:
а) обозначение высшего уровня;
б) обозначение функциональной группы;
в) обозначение конструктивного расположения (конструктивное обозначение);
г) позиционное обозначение;
д) обозначение электрического контакта;
е) адресное обозначение;
ж) составное обозначение.
Определения терминов, используемых в стандарте, приведены в приложении 1.
1.3. Условное обозначение, относящееся к определенному объекту, должно обеспечивать однозначную связь с данным объектом во всех случаях применения условного обозначения в
конструкторских документах на изделие.
1.4. Допускается применять условные обозначения, типы которых не установлены в настоящем стандарте. Содержание и способ записи таких условных обозначений должны быть пояснены в соответствующем конструкторском документе (например, на поле схемы или в
перечне элементов) или установлены в нормативно-технической документации.
1.5. Правила применения условных обозначений в различных конструкторских документах (схемах, перечнях, таблицах и пр.) должны устанавливаться государственными и, при необходимости, отраслевыми стандартами на правила выполнения соответствующих документов.
2. ОБЩИЕ ПРАВИЛА ПОСТРОЕНИЯ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
2.1. Требования к применяемым знакам
2.1.1. В условных обозначениях следует применять прописные буквы латинского и русского алфавитов и арабские цифры.
В одном условном обозначении высота букв и цифр должна быть одинаковой.
2.1.2. Построение условных буквенно-цифровых обозначений на основе букв латинского алфавита является предпочтительным.
В конструкторской документации, отправляемой за границу, должны применяться только буквы латинского алфавита.
2.1.3. Знак 0 должен использоваться и восприниматься как цифра «нуль», за исключением случаев, когда этот знак используется в заведомо буквенном сочетании (например, БОП – блок оперативной памяти).
Знаки 1, I, Iдолжны использоваться и восприниматься как
изображение цифры «единица».
Буква 3 и цифра «три» должны быть изображены графически разными знаками.
2.1.4. В условном обозначении, не являющемся составным, не допускается применять одновременно буквы латинского и русского алфавитов (например, Б, Г, Д, Ж и т.д. и D, F, G, J и т.д.), а также заменять латинские буквы русскими (и наоборот), сходными по наименованию, но различающимися начертанием (например, в на Д, G на Г, U на У и т.п.).
Примечание. В документации, не отправляемой за границу, допускается применять букву У вместо буквы Y (но не наоборот).
2.2. Структура условных обозначений
2.2.1. Условное буквенно-цифровое обозначение должно быть записано в виде последовательности знаков (букв, цифр или букв и цифр) в одну строку без пробелов.
Количество знаков в условном обозначении не ограничивается.
2.2.2. Две соседние группы знаков в условном обозначении, имеющие самостоятельное смысловое значение, следует разделять одним из методов:
а) сочетанием буквы и цифры (например, КС25, К2, К25 и т.п.)
б) точкой (например, КС.25, КС.А, 2.25 и т.п.).
В условном обозначении, содержащем несколько групп знаков, имеющих самостоятельное смысловое значение, допускается применять оба метода.
2.2.3. Если цифры в условном обозначении имеют смысл порядкового номера обозначаемого объекта, то допускается во всех условных обозначениях данного типа указывать одинаковое количество цифровых знаков, при этом старшие разряды номеров заполняют незначащими нулями, например, если порядковые номера не превышают 99, условные обозначения могут иметь вид:
А01, А02..А25…и т.д.
Примечание. Требования пп. 2.2.1–2.2.3 относятся к условным обозначениям любых типов, кроме составных обозначений.
2.2.4. Составное обозначение должно быть образовано последовательной записью условных обозначений различных типов в порядке, установленном в п. 1.2. Перед каждым условным обозначением, входящим в составное обозначение, должен быть указан квалифицирующий символ* в соответствии с табл. 1.
2.2.5. Составные обозначения в зависимости от характера их использования в конструкторском документе допускается записывать в одной из двух форм:
а) в строку (черт. 1);
б) в столбец (черт. 2).
2,2.6. Составное обозначение должно передавать комплексную информацию об объекте, условное обозначение которого указано последним (справа или снизу), не считая адресного обозначения-
Предшествующие условные обозначения (слева или сверху) должны указывать на последовательное вхождение данного объекта в объекты соответствующих типов. Адресное обозначение, стоящее оправа (или снизу) от условного обозначения объекта, указывает на место изображения (описания) соответствующего объекта в конструкторском документе.
Количество условных обозначений в составном обозначении не устанавливается, например, составное обозначение (черт – 3). содержащее максимальное количество условных обозначений (шесть), несет комплексное сообщение о некотором электрическом контакте.
| Тип условного обозначения |
Квалифицирующий символ |
Наименование применяемого знака
|
| I. Обозначение высшего уровня |
= |
Равно |
| 2. Обозначение функциональной группы |
≠ |
Не равно |
| 3. Обозначение конструктивного расположения (конструктивное обозначение) |
+ |
Плюс |
| 4. Позиционное обозначение |
- |
Минус |
| 5. Обозначение электрического контакта |
: |
Двоеточие |
| 6. Адресное обозначение |
() |
Обозначение заключают в круглые скобки |


2.2.7. Если необходимо уточнить тип условного обозначения, используемого самостоятельно (не входящего в составное обозначение), то допускается записывать его с квалифицирующим символом в соответствии с требованиями п. 2.2.4, например., + Е12.
3. Правила построения условных обозначения отдельных типов
3.1 – Обозначение высшего уровня
3.1.1. В качестве обозначения высшего уровня следует использовать:
а) позиционное обозначение устройства, присвоенное на схеме изделия и записанное в перечень элементов;
б) обозначение типа изделия, установленное ib стандарте или технических условиях.
Примечание. Если обозначения типов изделий стандартами или техническими условиями не установлены, допускается применять условные обозначения, установленные в их конструкторской или нормативно-технической документации.
3.2. Обозначение функциональной группы
3.2.1. Обозначение функциональной группы образуют из букв или букв и цифр, в сокращенной форме указывающих функциональное назначение (функцию) группы, например:
Ф – фильтр;
УПЧ – усилитель промежуточной частоты;
RG8 – 8-разрядный регистр;
TJK – JK-триггер и т.д.
Допускается обозначать функциональные группы только цифрами. В этом случае обозначение должно быть записано с квалифицирующим символом ≠, например, ≠27
3.2.2. Одинаковым функциональным группам (т.е. группам, имеющим тождественные принципиальные схемы) следует присваивать одно и то же условное обозначение.
Допускается в условные обозначения одинаковых функциональных групп включать порядковые номера, отделяя их от основного обозначения одним из методов, установленных в п. 2.2.2, например, УПЧ1, УПЧ2 или УПЧ.1, УПЧ.2.
3.3. Обозначение конструктивного расположения (конструктивное обозначение)
3.3.1. Устанавливаются два метода построения конструктивных обозначений – координатный и последовательный-
3.3.2. Конструктивное обозначение, построенное координатным методом, должно состоять из нескольких частей, каждая из которых обозначает одну координату объекта* в условной системе координат, принятой для данной конструкции. При этом обозначения координат должны быть разделены в соответствии с требованиями п. 2.2.2, например:**
+ С24 – конструктивное обозначение места в изделии, имеющего координаты: ряд С, колонка 24;
+ 5.24 – то же, координаты: ряд 5, колонка 24.
3.3.3. Конструктивное обозначение, построенное последовательным методом, должно представлять собой цифровое (порядковый номер) или буквенное обозначение, присвоенное данному месту в конструкции и установленное в конструкторском документе (например, на сборочном чертеже), например:
+ 204 – место №204;
+ В.2 – зона В, вторая часть.
3.3.4. Для изделий, конструктивно выполненных в виде нескольких уровней входимости (например, изделия цифровой вычислительной техники), допускается применять конструктивные обозначения, представляющие собой последовательную запись конструктивных обозначений различных уровней. При этом порядок записи конструктивных обозначений должен соответствовать конструктивной входимости; обозначения различных уровней должны разделяться в соответствии с требованиями п. 2.2.2, например:
+ 2.05.4В12 – конструктивное обозначение, указывающее четыре уровня входимости: стойка 2, рама 05, панель 4, плата В12.
3.3.5. Содержание и способ записи конструктивных обозначений (например, принятая система координат, условные направления координатных осей, метод обозначения каждой координаты и т.п.) определяются особенностями конкретной конструкции и должны быть пояснены в соответствующем конструкторском документе (например, на сборочном чертеже) или установлены в нормативно-технической документации. 3.4. Позиционное обозначение
3.4.1. Позиционные обозначения должны быть присвоены всем элементам и устройствам изделия в конструкторском документе, показывающем полный состав элементов и (или) устройств изделия (например, на принципиальной схеме).
3.4.2. Позиционное обозначение должно состоять, в общем случае, из трех частей, имеющих самостоятельное смысловое значение я записываемых без разделительных знаков и пробелов.
3.4.3. В первой части позиционного обозначения должен быть указан вид элемента (устройства). Она должна содержать одну или несколько букв, например:
· *Геометрическая форма, размеры и ориентация объекта не учитываются.
· ** Примеры конструктивных обозначений для наглядности приведены с квалифицирующим символом +.
R – резистор;
С – конденсатор;
DS – запоминающее устройство.
3–4.4. Во второй части позиционного обозначения должен быть указан порядковый номер элемента (устройства) в пределах элементов (устройств) данного вида. Она должна содержать одну или несколько цифр, например: R1, R2,… R12; С1, С2…С14.
При изображении на схеме элемента или устройства разнесенным способом допускается к порядковому номеру добавлять условный номер изображенной части элемента, разделяя порядковый и условный номера точкой, например:
D13.2 – цифровая интегральная микросхема D13, часть 2 (второй логический элемент).
Примечание. Условный номер части элемента (устройства) в перечне элементов не указывают.
3. 4,5. В третьей части позиционного обозначения допускается: указывать функциональное назначение данного элемента или устройства, примененного в схеме данного изделия. Она должна содержать одну или несколько букв, например:
C4J – конденсатор С4, используемый как интегрирующий; D7S – микросхема D7, выполняющая (в данном применении) функцию памяти.
Позиционные обозначения с одинаковой первой частью могут иметь в третьей части различные обозначения, например: R1 – резистор R1;
R2N – резистор R2, используемый как измерительный; R3F – резистор R3, используемый как защитный (предохранительный).
Применяемые буквенные коды, указывающие функциональное назначение, должны быть пояснены в соответствующем конструкторском документе (например, на принципиальной схеме) или установлены в нормативно-технической документации.
В конструкторской документации на изделия, разрабатываемые по заказам Министерства обороны СССР, применение в позиционных обозначениях буквенных кодов функционального назначения должно быть согласовано с заказчиком.
Перечень буквенных кодов функционального назначения, рекомендуемых Публикацией МЭК 113–2 и рекомендацией СЭВ по стандартизации PC 3490–72, приведен в справочном приложении 2
Таблица 2
| Буквенный код обязательный |
Буквенный код рекомендуемый |
Вид элемента (устройства) |
Примеры элементов (устройств) |
А
-
|
-
A
|
Устройства (общее обозначение)
Усилители
|
Схемы интегральные (кроме цифровых).
Агрегаты электромашинные
Усилители ламповые.
Усилители полупроводниковые
Усилители магнитные.
Усилители электромашинные.
Приборы квантовые
|
| - |
B |
Преобразователи неэлектрических величин в электрические (кроме генераторов и источников питания)
Преобразователи электрических величин в неэлектрические
|
Датчики термоэлектрические.
Термопары.
Фотоэлементы.
Громкоговорители. Микрофоны
3 вукосниматели
Элементы магнитострик ционные.
Пьезоэлементы.
Сельсины.
Счетчики электрических величин.
Детекторы ионизирующих излучений
|
| С |
- |
Конденсаторы |
Конденсаторы постоянной емкости (полярные и неполярные).
Конденсаторы переменной емкости (регулируемые).
Конденсаторы проходные.
Конденсаторы опорные.
Вариконды
|
| D |
- |
Элементы логические двоичные |
Схемы интегральные цифровые.
Элементы комбинационные логические.
Триггеры.
Элементы задержки цифровые.
Элементы моностабильные (одновибраторы).
Линии задержки.
|
| DS |
- |
Устройства хранения цифровой информации |
Устройства запоминающие оперативные на магнитный сердечниках, магнитных пленках и т.п.
Блоки памяти полупроводниковые.
Устройства памяти, постоянные и полупроводниковые.
Накопители с подвижными магнитными носителями (ленты магнитные, диски, барабаны и т.п.)
|
| E |
- |
Элементы разные |
Элементы, для которых не установлено специальных буквенных кодов |
| - |
F |
Элементы и устройства защитные |
Предохранители, Разрядники.
Реле защитные.
Автоматы защиты, сети
|
| Буквенный код |
Вид элемента (устройства) |
Примеры элементов (устройств) |
| обязательный |
рекомендуемый |
| G |
_
|
Генераторы
|
Генераторы вращающиеся постоянного и переменного тока. Преобразователи частоты вращающиеся. Генераторы гармонических колебаний. Генераторы импульсные. Генераторы вращающиеся. Осцилляторы. Генераторы кварцевые |
О QB
|
Источники питания Батареи
|
Источники питания электрохимические, термоэлектрические и т.п. Источники питания стабилизированные
Батареи аккумуляторные
|
Н
|
Устройства индикационные и сигнальные
|
Приборы световой сигнализации (лампы сигнальные, индикаторы ионные и полупроводниковые) Индикаторы символьные оптические. Приборы звуковой сигнализации (звонок, сирена, гудок и т.п.)
|
К КР
|
Реле. Искатели. Контакторы
Реле поляризованные
|
Реле электромагнитные. Искатели электромагнитные. Пускатели
|
L
|
_
|
Катушки индуктивные |
Катушки индуктивные. Дроссели
|
| М |
Двигатели
|
Двигатели однофазные. Двигатели трехфазные. Двигатели постоянного тока. Двигатели линейные |
_
_
_
|
Р
РА
PU
|
Приборы и устройства измерительные. Аппаратура испытательная Амперметры Вольтметры |
Приборы измерительные (показывающие, регистрирующие, интегрирующие)
|
_
|
Q
|
Устройства механические коммутационные для силовых цепей |
Выключатели силовые. Разъединители. Токосъемники
|
R
|
Резисторы
|
Резисторы постоянные. Резисторы переменные. Резисторы подстроечные. Тензорезисторы. Терморезисторы |
–
|
S
|
Устройства коммутационные
|
Выключатели. Кнопки. Переключатели. Командоконтроллеры
|
Т
|
_
|
Трансформаторы
|
Автотрансформаторы. Трансформаторы вращающиеся |
_
|
U
|
Преобразователи электрических величин. Устройства связи |
Модуляторы. Демодуляторы. Дискриминаторы. Преобразователи частотные. Фазовращатели. Инверторы. Конверторы. Передатчики телеграфные. Телефоны |
_
|
V
|
Приборы электровакуумные Приборы полупроводниковые |
Лампы электронные. Трубки электроннолучевые. Приборы газоразрядные (ионные). Диоды полупроводниковые. Диодные столбы. Транзисторы. Тиристоры
|
| _ |
W
|
Линии и элементы СВЧ. Антенны |
Волноводы. Соединители волноводные. Диполи. Антенны. Устройства антенные
|
_
|
X
|
Соединения разъемные. Соединители монтажные. Устройства соединительные |
Гнезда. Клеммы. Зажимы. Планки. Колодки. Разъемы
|
_
|
Y
|
Устройства механические с электрическим приводом |
Тормоза. Муфты сцепления. Пневматические клапаны. Электромагниты
|
| _ |
Z
|
Устройства оконечные. Трансформаторы гибридные. Фильтры. Ограничители |
Многополюсники кабельные балансные. Сети распределительные. Фильтры кварцевые
|
Примечания:
1. В конструкторской документации, отправляемой за границу, все коды приведенные в таблице, за исключением кодов, состоящих из двух букв, являются обязательными. Коды, состоящие из двух букв, должны быть пояснены.
2. Применение в позиционных обозначениях букв I и O в качестве самостоятельных буквенных кодов, а также в качестве начальных букв кодовых комбинаций не допускается.
3. Буквенные коды J и N являются резервными.
3.4.7. Буквенные коды видов элементов и устройств, не установленные настоящим стандартом, но специфичные для определенных отраслей, должны устанавливаться в отраслевых стандартах.
3.4.8. Если в конструкторском документе применяют позиционные обозначения с не стандартизованными буквенными кодами, то применяемые коды должны быть в этом документе пояснены. При этом значения первых букв должны соответствовать. приведенным в табл. 2 в качестве обязательных.
3.5. Обозначение электрического контакта
3.5.1. Если электрические контакты (выводы) элемента или устройства, являющегося покупным изделием, маркированы, то эта маркировка должна быть повторена в конструкторском документе (на схеме или в таблице).
Обозначения, не нанесенные на изделие, но указанные в его документации (например, циклевка электровакуумных приборов, номера выводов микросхем и т.п.), также должны быть. повторены в конструкторских документах.
3.5.2. Если обозначения электрическим контактам присваивают при разработке изделия, то рекомендуется обозначать их порядковыми номерами, начиная с единицы: 1, 2, 3. – ..10, 11,… и т.д. «ли 01, 02, 03,… 10,…. и т.д.
Если электрические контакты изделия конструктивно сгруппированы в несколько групп (контактных полей), то допускается обозначать контакты по группам сочетанием букв и цифр, например:
первая группа – Al, A2…A9,
вторая группа – Б1, Б2….Б9 и т.д.
3.6 – Адресное обозначение
3.6.1. При ссылках на объекты, изображенные на одном листе документа, в адресном обозначении следует указывать обозначение строки или колонки или буквенно-цифровые координаты зоны, например:
– Rl (E) – резистор изображен в ряду Е;
– С4 (06) – конденсатор С4 изображен в колонке 06;
– А2 (В12) – устройство А2 изображено в зоне В12.
3.6.2. При ссылках на другие листы документа в адресное обозначение должен быть включен номер листа, например:
D61 (З.Е8) – микросхема D61 изображена на третьем листе в зоне Е8.
3:6.3. При ссылках на другие документы в адресное обозначение должно быть включено обозначение соответствующего документа, например:
– К24 (АБВГ.XХХХХХ.XХХ.Э3.12.А15) – реле К24 изображено на схеме АБВГ.ХХХХХХ.ХХХ.ЭЗ. лист 12, зона А15.
6–5 Оказание первой помощи при переломах
Переломом называется нарушение целости кости. Различают переломы травматические и патологические. Возникновение последних обусловлено наличием патологических процессов в кости (туберкулез, остеомиелит, опухоли), при которых обычная нагрузка на определенном этапе течения этих болезней приводит к перелому. Травматические переломы делятся на закрытые (без повреждения кожи) и открытые, при которых имеется повреждение кожи в зоне перелома. Открытые переломы опаснее закрытых, так как очень велика возможность инфицирования отломков и развития остеомиелита, что значительно затрудняет срастание костных отломков.
Перелом может быть полным и неполным. При неполном переломе нарушается какая-нибудь часть поперечника кости, чаще в виде продольной щели – трещина кости.
Переломы бывают самой разнообразной формы: поперечные, косые, спиральные, продольные. Часто наблюдаются оскольчатые переломы, когда кость разбита на отдельные осколки. Этот вид чаще встречается при огнестрельных ранениях. Перелом, возникающий от сдавления или сплющивания, называется компрессионным.
Большинство переломов сопровождается смещением отломков, что обусловлено, с одной стороны, направлением механической силы, вызвавшей перелом, с другой – тягой прикрепляющихся к кости мышц вследствие их сокращения после травмы. В зависимости от характера травмы, локализации перелома, силы прикрепляющихся мышц и т.д. смещения костных отломков могут быть различных видов: смещения под углом, смещения по длине, боковые смещения.
Нередко встречаются вколоченные переломы, когда один из отломков внедряется в другой. Для перелома характерны: резкая боль, усиливающаяся при любом движении и нагрузке на конечность, изменение положения и формы конечности, нарушение ее функцикости. При ощупывании места перелома больной ощущает резкую боль; при этом удается определить неровность кости, острые края отломков и хруст (крепитация) при легком надавливании. Проводить ощупывание конечности, особенно определение патологической подвижности, надо осторожно, двумя руками, стараясь не причинять боли, и так, чтобы не вызвать осложнений (повреждение отломками кости кровеносных сосудов, нервов, мышц, кожных покровов и слизистых).
При открытом переломе нередко в рану выступает отломок кости, что прямо указывает на перелом. В этом случае проводить ощупывание и исследование области перелома запрещается.
Правильная и своевременная помощь при переломах является одним из важнейших моментов их лечения. Быстро оказанная первая помощь во многом определяет заживление переломов, позволяет часто предупредить развитие ряда осложнений (кровотечение, смещение отломков, шок и т.д.).
Основными мероприятиями первой помощи при переломах костей являются:
1) создание неподвижности костей в области перелома;
2) проведение мер, направленных на борьбу с шоком или его предупреждение;
3) организация быстрейшей доставки пострадавшего в лечебное учреждение.
Кожа обладает значительной прочностью, и при травмах нарушения ее целости часто не происходит, в то время как мягкие ткани и кости могут значительно разрушаться.
Наиболее распространенным повреждением мягких тканей и органов является ушиб, который чаще всего возникает вследствие удара тупым предметом. На месте ушиба быстро появляется припухлость, а часто и кровоподтек (синяк). При разрыве крупных сосудов под кожей могут образоваться скопления крови (гематомы). Ушибы приводят к нарушению функции поврежденного органа. Если ушибы мягких тканей тела вызывают лишь боль и умеренное ограничение движения конечностей, то ушибы внутренних органов (мозг, печень, легкие, почки) могут привести к тяжелым нарушениям во всем организме и даже к смерти.
При движениях в суставе, превышающих его физиологический объем, или при движении в несвойственном суставу направлении возникают растяжения и разрывы связок, укрепляющих сустав. Растяжение характеризуется появлением резких болей, быстрым развитием отека в области травмы и значительным нарушением функций суставов.
Очень тяжелой травмой конечности является сдавление, при котором происходит размозжение мышц, подкожной жировой клетчатки, сосудов и нервов. Такие повреждения возникают от давления больших тяжестей (стена, балка, земля) во время обвалов, бомбардировок, землетрясений.
Сдавления сопровождаются развитием шока, а в последующем – отравлением организма продуктами распада разрушенных мягких тканей.
При ушибе прежде всего необходимо создать покой поврежденному органу. На область ушиба необходимо наложить давящую повязку, придать этой области тела возвышенное положение, что способствует прекращению дальнейшего кровоизлияния в мягкие ткани. Для уменьшения болей и воспалительных явлений к месту ушиба прикладывают холод – пузырь со льдом, холодные компрессы.
Первая помощь при растяжении связок такая же, как и при ушибах, т.е. прежде всего, накладывают повязку, фиксирующую сустав. При разрыве сухожилий, связок первая помощь заключается в создании больному полного покоя, наложении тугой повязки на область поврежденного сустава, чтобы прочно фиксировать его. Для уменьшения болей пострадавшему можно дать 0,25–0,5 г анальгина и амидопирина, а к области травмы приложить пузырь со льдом.
При любом растяжении необходимо обратиться к врачу, так как подобная симптоматика может быть и при трещинах кости.
Основной задачей первой помощи при сдавлении является организация мер по немедленному извлечению пострадавшего из-под обрушившихся на него тяжестей.
Сразу после освобождения от тяжестей для предотвращения поступления ядовитых продуктов распада в организм из размозженных тканей конечностей на последние необходимо наложить жгуты как можно ближе к основанию конечности, как при остановке артериального кровотечения, обложить конечности пузырями со льдом или тканью, смоченной холодной водой. Поврежденные конечности иммобилизуют при помощи шин. У таких больных очень часто уже в момент травмы развивается тяжелое общее состояние – шок. Для борьбы с шоком или для его профилактики больного следует тепло укрыть, дать водки, вина, горячего кофе или чая. По возможности следует ввести наркотики (омнопон, морфин), сердечные средства. Больной подлежит немедленной транспортировке в лечебное учреждение в положении лежа.
Повреждение сустава, при котором происходит смещение соприкасающихся в его полости костей с выходом одной из них через разрыв капсулы из полости сустава в окружающие ткани, называется вывихом. Вывих может быть полным, когда суставные поверхности костей перестают соприкасаться друг с другом, и неполным (подвывих), когда между суставными поверхностями имеется частичное соприкосновение.
Название вывих получает по той кости, которая находится дистальное (периферийнее) поврежденного сустава: например, вывих стопы – при смещении костей в голеностопном суставе, вывих плеча – при вывихе в плечевом суставе и т.п. Возникают вывихи в основном под действием непрямой травмы. Так, вывих бедра возможен при падении на согнутую ногу с одновременным поворотом ноги внутрь, вывих плеча – при падении на вытянутую руку.
Симптомами вывиха являются: боль в конечности, резкая деформация (западение) области сустава, отсутствие активных и невозможность пассивных движений в суставе, фиксация конечности в неестественном положении, не поддающемся исправлению, изменение длины конечности, чаще ее укорочение.
Первая помощь при вывихе заключается в проведении мероприятий, направленных на уменьшение болей: холод на область поврежденного сустава, применение обезболивающих (анальгин, амидопирин, промедол и др.), иммобилизация конечности в том положении, которое она приняла после травмы. Верхнюю конечность подвешивают на косынке или перевязке из бинта, нижнюю – иммобилизуют при помощи шин или подручных средств. Свежие вывихи вправлять значительно легче, чем застарелые. Уже через 3–4 ч после травмы в области поврежденного сустава развивается отек тканей, скапливается кровь, что затрудняет вправление. Вправление вывиха–врачебная процедура, поэтому пострадавшего необходимо скорее доставить к врачу. При вывихах верхних конечностей больные могут прийти сами в больницу или быть. доставлены на любом транспорте в положении сидя. Больных с вывихом нижних конечностей транспортируют в положении лежа.
Не следует пытаться вправить вывих, так как иногда трудно установить, вывих это или перелом, тем более что часто вывихи сопровождаются трещинами и переломами костей.
|