|
Федеральное агентство по образованию Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Южно-Уральский государственный университет»
Факультет «Приборостроительный»
Кафедра «Автоматика и управление»
ОТЧЕТ ПО ПРОИЗВОДСТВЕННОЙ ПРАКТИКЕ
Руководитель практики
Вставский А.Ю.
Автор отчета
студентка группы ПС–317
Нигаматзянова А.Р.
Челябинск 2011
Содержание
Введение
1. Основные сведения о ЗАО НИИИТ-РК
1.1 История образования ЗАО НИИИТ-РК
1.2 Организационная структура управления и состав основных функциональных служб ЗАО НИИИТ-РК
2. Индивидуальное задание на время практики
2.1 Техника безопасности и охраны труда. Пожарная безопасность
2.2 Общие сведения о диспетчерском радиолокаторе
2.3 Технические характеристики диспетчерского радиолокатора
2.4 Принцип работы и структура диспетчерского радиолокатора
2.5 Устройство и принцип работы прибора передатчик-приемник
2.6 Устройство и принцип работы ячейки Д2ХК251
2.7 Электрические параметры ячейки Д2ХК251
2.8 Принцип работы ячейки Д2ХК251
Заключение
Список использованной литературы
Введение
Производственная практика является важным этапом подготовки квалифицированных специалистов. Она является видом учебно-вспомогательного процесса, в ходе которого закрепляется теоретические знания на производстве, происходит углубление знаний, полученных в процессе теоретической деятельности, их увязку с реальными условиями производства.
Целью производственной практики является изучение студентами реального предприятия и условий работы на нем: получение прикладных навыков в разработке и сопровождении программ, работа с информационными потоками и документооборотом, изучение вопросов научной организации труда и управления производством, техники безопасности и охраны труда; ознакомление с технологическим процессом в целом, сбор материалов для отчета.
В данном отчете представлены результаты летней практики, которая проходила на предприятии ЗАО Научно-исследовательский институт по измерительной технике – радиотехнические комплексы (ЗАО НИИИТ-РК), в отделе в период c 5 июля по 30 июля 2010гг.
Специфика ЗАО "НИИИТ-РК" заключается в многолетнем опыте проектирования, изготовления и авторского обслуживания наземной и морской радиолокационной техники для нужд авиации. В основном, это совмещенные вторично-первичные диспетчерские радиолокаторы (ВПРЛ) аэродромной и аэроузловой зон с различным типом совмещения структур – от использования лишь общих приводов для антенных систем ПРЛ и ВРЛ до общих антенн, передатчиков и высокочастотного тракта.
Продукцию института отличает специфический характер:
· высокая степень важности изделий;
· малые серии до 10-20 единиц;
· уникальные, штучные изделия.
Специфика продукции сформировала определенные принципы проектирования. Это надежность, высокие показатели технических и эксплуатационных параметров, устойчивость к различным ситуациям (включая трудно прогнозируемые). Последние годы НИИИТ-РК уделяет существенное внимание вторичным радиолокаторам – автономным и встроенным. По заказам гражданской авиации России разработан ряд моноимпульсных вторичных радиолокаторов (МВРЛ) под обобщенным названием "КРОНА".
С 1997 года изготовлены и введены в эксплуатацию четыре автономных МВРЛ: аэропорт Чита, аэропорт Нукус, аэропорт Термез, аэропорт Омск; и четыре встроенных: аэропорт Домодедово (Москва), аэропорт Самарканд, аэропорт Бухара, аэропорт Ургенч.
В стадии пуско-наладочных работ находятся проекты по оснащению аэропортов: Колпашево, Киров, Североуральск, Енисейск, Ванавара, Богучаны, Чайбуха, Анадырь.
1.1 История образования ЗАО НИИИТ-РК
Научно-исследовательский институт по измерительной технике создан в 1959 г. путем реорганизации особого конструкторского бюро в Государственный научно-исследовательский институт, на который было возложено выполнение научно-исследовательских и опытно-конструкторских работ по созданию новой и модернизации существующей аппаратуры для навигации, управления воздушным движением и посадки самолетов.
Период 1959-1970 г.г. — это период становления института.
В первые годы (1959-1962г.г.) в институте развивалось преимущественно два направления — создание средств навигации и средств посадки самолетов.
В 1963 г. Появляется третье направление — контрольно-проверочная аппаратура для проверки бортового радиоэлектронного оборудования: радиотехнических систем ближней навигации, самолетного радиолокационного ответчика, бортовых вычислительных машин, системы предупреждения столкновений самолетов в воздухе и другого оборудования.
Спустя 2 года в институте начинаются работы ещё в одном направлении — радиопеленгации, и за последующие годы создаются радиопеленгаторы для аэропортов различного класса и ведомств, в том числе для местных воздушных линий (МВЛ) и горных аэропортов, радиопеленгационные сети для МВЛ и северных районов.
В начале 1969 г. Институт подключается к работам в направлении создания систем для точного определения местоположения самолета при аэрофотосъемке и систем для определения местоположения грозовых облаков. Результатом работ явилось создание радиодальномерной системы, грозопеленгатора дальномера, а также высокоточной радиодальномерной системы для определения места кораблей при гидрографических работах.
К 1970 г. Этап становления и быстрого развития института закончился. Институт уверенно заработал в закрепленных за ним направлениях техники, практически все его разработки осваивались на серийных заводах, а изготовленные изделия поставлялись для нужд военных и гражданских потребителей.
Период 1970-1990 г.г. — это период выполнения институтом наибольшего объема работ. В этот период произошло объединение института и Челябинского радиозавода — было создано производственное объединение "Полет".
Этот период характеризуется выполнением крупных государственных заказов, предусматривавших разработку, изготовление и оснащение авианесущих кораблей системами навигации, управления полетами и посадки на корабли летательных аппаратов, а также разработку, изготовление и оснащение аэродрома Байконур и запасных аэродромов наземными системами радиоэлектронного обеспечения полетов многоразового космического корабля "Буран".
С возникновением объединения "Полет" в институте появляется ещё одно тематическое направление — радиолокация. Результатами работ в этом направлении явилось создание первичных и вторичных радиолокационных станций (РЛС), прецизионных следящих посадочных РЛС, РЛС обзора летного поля, обзорных диспетчерских РЛС, аппаратуры обработки радиолокационной информации и аппаратуры её документирования.
В 1992 г. НИИИТ вышел из состава объединения "Полет" и перешел под юрисдикцию правительства России.
Реальные перемены и реформы в экономике страны, необходимость конверсии института и проявленная руководством института инициатива привели к приватизации и реорганизации института. В результате были созданы дочерние предприятия, которым были отданы существующие в институте направления деятельности. Работниками дочерних предприятий стали сотрудники института, которые ранее этими направлениями и занимались.
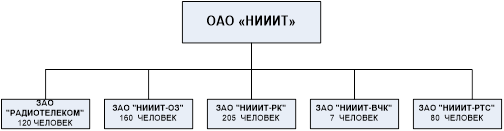
Наиболее крупные, преуспевающие и наукоемкие дочерние предприятия:
ЗАО "РАДИОТЕЛЕКОМ" — организует и осуществляет выполнение перспективных работ, а также осуществляет сервисное обслуживание ОАО НИИИТ с дочерними предприятиями
ЗАО "НИИИТ-РТС" — ведет разработку радиотехнических систем навигации и посадки самолетов и аппаратуры для их сервисного обслуживания
ЗАО "НИИИТ-ОЗ" — опытный завод, обеспечивающий полный цикл производства опытных образцов и малых серий аппаратуры по тематике ОАО НИИИТ. Осуществляет также производство продукции по внешним заказам.
ЗАО "НИИИТ-ВЧК" — ведет разработку высокочастотных комплексов.
ЗАО "НИИИТ-РК" — ведет разработку радиотехнических комплексов управления воздушным движением, в том числе вторичных радиолокаторов.
Институт постоянно работает над улучшением своей продукции, создавая новые поколения аппаратуры, осваивает новые рынки сбыта и стремится освоить новые направления деятельности на основе имеющихся научно-технических заделов.
1.2 Организационная структура управления и состав основных функциональных служб ЗАО НИИИТ-РК
Структура организации:
- Директор;
- Первый заместитель директора;
- Заместитель директора по финансам и экономике;
- Заместитель директора по тематике;
- Главные конструктора;
- Общий отдел;
- Отдел управления и планирования;
- Первый отдел;
- Научно-исследовательский отдел- радиотехнический №1;
- Научно-исследовательский отдел- радиотехнический №2;
- Научно-исследовательский отдел- высокочастотный;
- Научно-исследовательский отдел- программного обеспечения;
- Конструкторский отдел №1;
- Конструкторский отдел №2;
- Технический отдел;
- Отдел комплектации;
- Отдел метрологии;
- Отдел кадров;
- Бюро по охране труда;
- Бюро ремонтов телефонов;
- Здравпункт;
- Охрана;
- Электроучасток;
- Сан.тех. участок;
2. Индивидуальное задание на время практики
В качестве индивидуального задания было: рассмотрение диспетчерского радиолокатора (ДРЛ), его принципа работы, изучение согласно техническим условиям ячейки Д2ХК251, входящей в состав передатчика-приемника, а также были изучены технология и организация производства, правила техники безопасности и охраны труда, требования по обеспечению пожарной безопасности. Для выполнения этого задания был изучен ГОСТ 21800-89, а также вся конструкторская документация на данную ячейку.
Вопросы связанные с созданием аэродромных радиолокационных, радионавигационных, радиосвязных средств и комплексов представляют большой интерес для изучения, благодаря большому значению и широкому спектру их применения в контроле, управлении и регулировании летательными аппаратами в современных условиях воздушного движения.
2.1 Техника безопасности и охраны труда. Пожарная безопасность
Общие положения
Вводный инструктаж по охране труда проводиться до начала работы со всеми вновь принимаемыми на постоянную работу, с временными работниками, с командированными, учащимися и студентами, прибывшими на производственное обучение или практику, независимо от их образования, стажа работы по данной профессии или должности.
Целью вводного инструктажа на предприятии является ознакомление с местными условиями труда, правилами внутреннего трудового распорядка и основными вопросами по охране труда.
Первичный инструктаж на рабочем месте проводится после вводного инструктажа до начала производственной деятельности (производственного обучения), руководителем подразделения предприятия.
Целью первичного инструктажа является ознакомление работников, студентов, учащихся с производственной обстановкой и безопасными условиями труда на конкретном рабочем месте.
Основными видами обучения мерам пожарной безопасности являются противопожарный инструктаж и изучение минимума пожарно-технических знаний
Таким образом, после проведенных инструктажей, эксплуатируя электрооборудование при выполнении трудовых обязанностей, необходимо иметь:
· элементарное знакомство с эксплуатируемой электроустановкой;
· знать основные меры предосторожности по охране труда, основам противопожарной защиты, соблюдать технические меры при выполнении работ;
· иметь отчетливое представление об опасности поражения электрическим током;
· иметь теоретические знания и практические навыки оказания первой доврачебной помощи пострадавшим от электротока, при пожаре.
О проведении всех видов инструктажей и производятся записи в соответствующем журнале регистрации инструктажей по охране труда, с обязательной подписью инструктируемого и инструктирующего.
Ответственных за ведение и хранение журналов регистрации инструктажей по охране труда, установленный приказом по предприятию, является начальник бюро по охране труда.
2.2 Общие сведения о диспетчерском радиолокаторе
Данный ДРЛ предназначен для радиолокационного контроля воздушной обстановки, получения радиолокационной информации(азимута и дальности) о всех летательных аппаратов (ЛА), в том числе не оснащённых бортовым радиоэлектронным оборудованием (БРЭО) и радиолокационным оборудованием (РЛО), находящихся в зоне обнаружения ДРЛ.
Радиолокационная информация ДРЛ предназначена для решения задач управления воздушным движением в районе корабельного аэродрома.
2.3 Технические характеристики ДРЛ
Основными техническими данными ДРЛ являются:
Частотный диапазон работы ДРЛ, МГц:
2. Зона обзора ДРЛ по летательному аппарату корабля (ЛАК) при вероятности обнаружения 0,85 и вероятности ложной тревоги 10-5
- в горизонтальной плоскости, 360º
- в вертикальной плоскости (от горизонта), от минус 1 до 30º
- минимальная дальность, 500м
- максимальная дальность, 80км
Среднеквадратические погрешности измерения координат:
- по азимуту
- по дальности
Разрешающая способность:
- по азимуту
- по дальности
Период обновления радиолокационной информации, (10±1)с
Внешние условия использования ДРЛ:
Потребляемая мощность от корабельной трехфазной сети 380В 50Гц, не более 15кВт
2.4 Принцип работы и структура диспетчерского радиолокатора
ДРЛ является первичным радиолокатором, получающим информацию о воздушной обстановке по отраженным радиоволнам от окружающих объектов, в том числе и летательным аппаратам (ЛА). Первичным источником радиоволн является передатчик радиолокатора.
ДРЛ должен выделить сигналы, приходящие от ЛА из всех сигналов, поступающих на вход радиолокатора и собственных шумов приёмника ДРЛ. . Передатчик ДРЛ полупроводниковый и имеет суммарную мощность сравнительно небольшую, примерно 15-20 кВт. Чтобы обеспечить требуемую энергию излучаемый импульс имеет длительность 64 мкс.
Для выделения сигналов на фоне шумов используется накопление информации о целях, поступающей в результате нескольких зондирований (излучений) в одном направлении. При этом используется то свойство, что принимаемые и отраженные сигналы, носящие регулярный характер, складываются арифметически, а хаотические шумы приёмника – геометрически:
 (1) (1)
где  – уровень сигнала после накопления; – уровень сигнала после накопления;
 – уровень сигнала на отдельных зондированиях. – уровень сигнала на отдельных зондированиях.
 (2) (2)
где  – уровень шума после накопления; – уровень шума после накопления;
 – уровень шума на отдельных зондированиях. – уровень шума на отдельных зондированиях.
То есть, при накоплении по n зондирований отношение Uc к Uш улучшается в  раз. Так при накоплении по 64 зондированиям коэффициент улучшения равен 8. раз. Так при накоплении по 64 зондированиям коэффициент улучшения равен 8.
ДРЛ осуществляет многократные зондирования, устанавливая луч в заданном направлении и удерживая его на этом направлении 16 зондирования. Цель видна ДРЛ на четырех положениях луча – всего 64 раза.
ДРЛ имеет сравнительно большую ширину луча в вертикальной плоскости. Это приводит к тому, что ЛА облучаются как энергией, идущей по направлению ДРЛ – ЛА, так и энергией, отраженной от земли (воды). Эти два потока складываются в пространстве. При этом в силу разной длины пути они имеют разные фазы синусоидальных колебаний несущей частоты. На одних углах места относительно горизонта происходит взаимное сложение прямого и отраженного от земли сигнала на других – вычитание. В направлениях, где происходит вычитание возникают провалы уровня мощности, облучающей объекты и ЛА. При попадании в эти провалы ЛА перестают обнаруживаться радиолокатором.
Положение провалов по углу места зависит от частоты излучаемого радиосигнала. Чтобы регулярности положения провалов в вертикальной диаграмме направленности луча не было, ДРЛ излучает не на одной, а на двух частотах, чередуя излучения на этих частотах.
Уровень отраженного от ЛА сигнала зависит от ракурса, под которым ДРЛ "видит" ЛА (спереди, сзади, сбоку), при некоторых ракурсах отраженный сигнал идёт прямо на ДРЛ, при некоторых с некоторым отклонением, а следовательно принимается ослабленным. Диаграмма уровня отраженных сигналов от ракурса зависит как от формы ЛА, так и от частоты радиосигнала.
Благодаря двухчастотной работе удаётся усреднить отраженный сигнал в зависимости от ракурса. То есть при одном и том же ракурсе на одной частоте сигнал может быть слабым, но на другой – сильным.
Для управления воздушным движением диспетчеру необходимо видеть прежде всего отметки от ЛА, а они маскируются сигналами, отраженными от местных предметов и в том числе от морской поверхности. Существенным отличием ЛА от местных предметов является то, что ЛА перемещаются в пространстве, а местные предметы неподвижны относительно ДРЛ.
Так как сигнал, отраженный от перемещающегося навстречу радиолокатору ЛА или удаляющегося от него, смещен по частоте относительно излучаемой несущей частоте. Этот эффект называется эффектом Доплера. Величина доплеровского сдвига частоты равна:
 (3) (3)
где  – радиальная скорость; – радиальная скорость;
 – несущая частота; – несущая частота;
 – скорость света; – скорость света;
 – доплеровская частота; – доплеровская частота;
Спектр сигнала от движущейся цели после прохождения фазового детектора содержит постоянную составляющую гармоники с доплеровской частотой, гармоники частоты повторения излучения и гармоники, отстоящие от гармоник частоты повторения на доплеровскую частоту. Спектр сигнала от неподвижной цели не содержит составляющие, вызываемые доплеровским эффектом.
Для выделения сигналов подвижных целей используют режекторные фильтры, которые подавляют постоянную составляющую и гармоники частоты повторения.
При определенных скоростях целей доплеровская частота становится близкой к частоте повторения и гармоники доплеровской частоты попадают в полосу режекции фильтра, который их подавляет. Цель, движущаяся с такой скоростью, не видна оператору радиолокатора. Такая скорость называется слепой.
Чтобы обеспечить наблюдение ЛА, движущихся с разными скоростями, в радиолокаторах, в том числе ДРЛ, меняется частота повторения излучений (вобулирование). Это приводит к тому, что зона режекции всё время меняется и меняются слепые скорости. Благодаря этому обеспечивается обнаружение ЛА на всех скоростях с необходимым качеством.
Аппаратура первичной обработки информации (АПОИ) обрабатывает информацию, приходящую от целей, в том числе в пределах ширины луча ДРЛ по азимуту. За это время ДРЛ осуществляет свыше 64 зондирований. По совокупности всех полученных отраженных сигналов осуществляется обнаружение движущихся целей, накопление и обнаружение сигналов. Итогом работы АПОИ является поток обнаруженных целей. Среди этих целей есть полезные от ЛА и мешающие от местных предметов, которые ложно приняты за полезные. Полезные цели, по тем или иным причинам могут быть не обнаружены и в данном обзоре не появиться на выходе АПОИ.
Для улучшения качества отображаемой воздушной обстановки используется межобзорная (вторичная) обработка. Аппаратура, которая выполняет эту функцию называется аппаратурой вторичной обработки информации (АВОИ).
АВОИ использует историю движения целей в течение нескольких обзоров. Истинная цель регулярно появляется от обзора к обзору и по большому количеству её появлений за определенное число обзоров она может быть выделена из совокупности ложных отметок, которые, как правило, не столь регулярны. АВОИ выполняет устранение двоений отметок и может восстанавливать отдельные точки траектории, если целей на этом обзоре не обнаружено.
Выше велась речь о принципах работы первичных радиолокаторов, позволяющих получать информацию о ЛА, имеющих большое удаление и малую эффективность отражения.
Радиолокатор, построенный на этих принципах, плохо работает на малых дальностях, сравнимых по времени распространения до них и обратно с длительностью излучаемого импульса.
На таких удалениях более приемлем радиолокатор, излучающий короткий импульс запроса (1,0-1,5 мкс). Такой радиолокатор не требует сжатия отраженных импульсов, но обеспечивает обнаружение движущихся целей и накопление энергии отраженных сигналов по всей пачке отраженных от цели импульсов.
ДРЛ осуществляет зондирование пространства двумя типами импульсов. Сначала излучается короткий (1 мкс, немодулированный по фазе) импульс, а через 75 мкс, длинный (64 мкс) модулированный по фазе (НЛЧМ).
Рабочая дальность по короткому импульсу запроса примерно 10 км.
Рабочая дальность по длинному импульсу технически достигает 70-80 км.
В ДРЛ входит: прибор ПРД – ПРМ (передатчик-приемник), прибор ПТУК – ДРЛ (панель технического управления и контроля диспетчерского радиолокатора) и АС ДРЛ (антенная система ДРЛ).
Прибор ПРД-ПРМ предназначен для: приема,формирования и передачи радиоимпульсных сигналов несущей частоты, формирования сигнала для контроля антенной системы и т.д.
Прибор ПТУК – ДРЛ предназначен для первичной и вторичной обработки аналоговой радиолокационной информации, выдачи обработанной информации в главный процессор, выдачи информации на отображение, управления и контроля ДРЛ.
Прибор АС ДРЛ предназначен для фазирования и усиления принимаемых и излучаемых сигналов сверхвысокой частоты (СВЧ) ДРЛ.
Структурная схема ДРЛ приведена на рисунке 1.
Примечания:
АВОИ – аппаратура вторичной обработки информации;
АПОИ – аппаратура первичной обработки информации;
ПТУК-ДРЛ– панель технического управления и контроля диспетчерского радиолокатора;
ПРД-ПРМ– передатчик-приемник;
МПП- приемо-передающий модуль;
АС ДРЛ – антенная система диспетчерского радиолокатора;
ВД – вычислитель ДРЛ;
УМ – усилитель мощности;
УПЧ– усилитель промежуточной частоты.
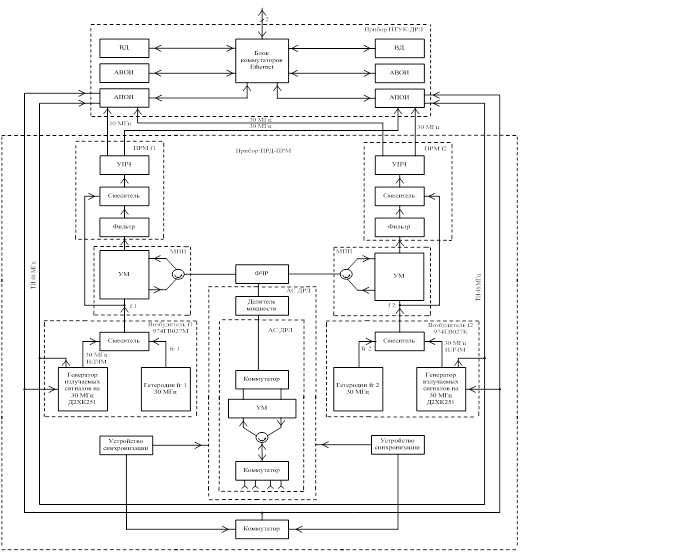
Рисунок 1 – Структурная схема ДРЛ
2.5 Устройство и принцип работы прибора передатчик-приемник
Передатчик-приемник состоит из секции ВЧ, двух блоков 974ГВ02 возбудителей, двух блоков 974ПП05М, секции источника питания (ИП), синхронизации и контроля, панели управления ПРД-ПРМ.
Блок 974ПП05М – предназначен для преобразования входных сигналов, усиления сигналов на промежуточной частоте и передачи на аппаратуру первичной обработки информации (АПОИ).
Блок 974ГВ02 – предназначены для формирования импульсных сигналов несущей частоты f, импульсов синхронизации и тактовых импульсов.
В приборе ПРД-ПРМ располагается два канала оборудования однотипного по назначению, но работающего на разных частотах – f1 и f2.
Пока в канале f1 генерируются короткие импульсы, в канале f2 генерируются длинные импульсы. Затем в канале f1 генерируются длинные импульсы, а в канале f2 генерируются короткие импульсы.
Каждый канал содержит возбудитель, приёмное устройство и модуль приёмо-передающий.
Возбудитель генерирует сигналы, которые излучает ДРЛ. С периодом повторения запросов возбудитель одного частотного канала формирует, то серию из 8 импульсов МОНО длительностью 1 мкс, то серию из 8 импульсов НЛЧМ, длительностью 64 мкс.
Работа возбудителей двух частотных каналов синхронизируется устройством синхронизации основного комплекта.
Излучаемые сигналы с выхода возбудителя поступают на модуль приёмо-передающий, на входящий в него усилитель мощности (УМ). УМ усиливает сигнал до уровня необходимого для работы АС ДРЛ.
С выхода УМ через циркулятор и фильтр частотно-разделительный (ФЧР) сигнал отправляется в АС ДРЛ.
Возбудители обоих частотных каналов осуществляют взаимную синхронизацию от возбудителя назначенного ведущим.
Используются опорные тактовые импульсы 48 МГц возбудителя ведущего канала. Эти тактовые импульсы передаются в АПОИ обоих комплектов для формирования опорного напряжения цифрового фазового детектора.
Приёмное устройство каждого частотного канала принимает отражённые сигналы своей частоты, которые поступают из АС ДРЛ через ФЧР циркулятор и МШУ модуля приёмо-передающего.
В приемном устройстве осуществляется фильтрация принимаемых сигналов, перевод их на промежуточную частоту 30 МГц и усиление.
Для работы смесителя, обеспечивающего перевод сигнала на промежуточную частоту, на приёмное устройство подаётся частота гетеродина с возбудителя своего частотного канала.
Сигналы с промежуточной частоты с выхода приемного устройства передаются в АПОИ первого и второго комплекта.
В каждом возбудителе имеется ячейка Д2ХК251, которая генерирует короткие или длинные импульсы на частоте 30 МГц.
В каждом канале сигнал с частотой 30 МГц из ячейки Д2ХК251 поступает на вход смесителя своего канала.
В смесителе происходит перенос сигнала 30 МГц на несущую частоту f1 (канал f1) и несущую частоту f2 (канал f2).
На другой вход смесителя поступает сигнал гетеродина. Частота сигнала гетеродина равна f1 минус 30 МГц для частотного канала f1, и f2 минус 30 МГц для частотного канала f2.
Эти сигналы усиливаются усилителем мощности модуля приёмопередающего и уходят через фильтр частотно-разделительный в антенную систему ДРЛ.
Генерация частоты 30 МГц осуществляется генератором, тактируемым импульсами с частотой 48 МГц. Эти импульсы формируются в каждой ячейке Д2ХК251, но используются только тактовые импульсы ячейки, которая назначена ведущей.
Ячейка другого частотного канала – ведомая, и её генератор не используется.
Тактовые импульсы 48 МГц ведущей ячейки Д2ХК251 используются для работы ведомой ячейки.
2.6 Устройство и принцип работы ячейки Д2ХК251
Ячейка Д2ХК251 предназначена для:
- формирования радиоимпульсных МОНО сигналов с частотой 30 МГц;
- формирования радиоимпульсных НЛЧМ (нелинейная частотная модуляция) сигналов;
- формирования радиоимпульсных НЛЧМ контрольного сигнала для приемного устройства;
- формирования цифровых сигналов синхронизации и управления уровня транзисторно-транзисторной логики (ТТЛ);
- формирования тактовых сигналов частотой 48 МГц и 5,2 кГц.
В состав ячейки Д2ХК251 входят:
- цифровой формирователь сигналов синхронизации и управления и зондирующих сигналов реализованный на базе ПЛИС;
- генератор 48 МГц;
- DC-DC преобразователи;
- высокочастотные операционные усилители;
- полосовой фильтр (ПФ);
- постоянное запоминающее устройство (ПЗУ);
- цифро-аналоговый преобразователь (ЦАП);
- цифровые магистральные усилители.
Функциональная схема ячейки Д2ХК251 приведена на рисунке 2
Расшифровка аббревиатуры приведена далее.
| Рисунок 1 – Функциональная схема ячейки Д2ХК251
|
|
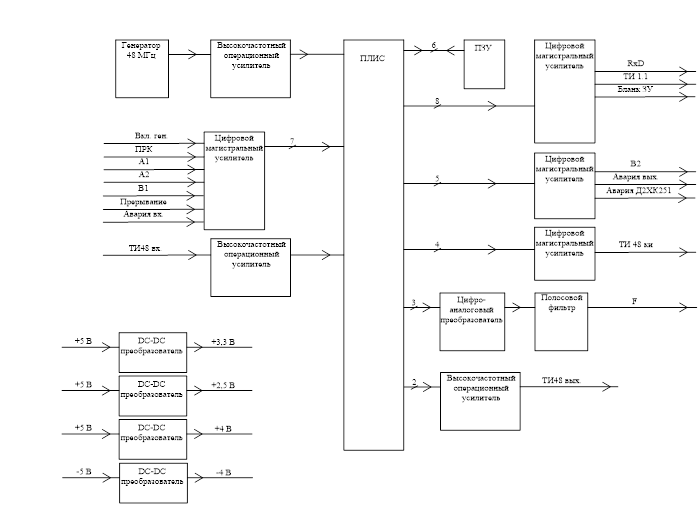 Рисунок 2 – Функциональная схема ячейки Д2ХК251
Описание функциональной схемы:
Ячейка Д2ХК251 работает в режиме внешней синхронизации. Задающим сигналом для ячейки является "Метка запуска" (МЗ), поступающий с устройства синхронизации передатчика-приемника на устройство коммутации и контроля и через формирователь прерываний подается на ячейку.
Режим внешнего запуска осуществляется по сигналу "Прерывание".
Параметры импульсного сигнала "Прерывание":
- период повторения 6,25 мс;
- длительность импульса 1 мкс;
- уровень сигнала ТТЛ (наличие сигнала "логической 1", отсутствие сигнала "логического 0").
Сигнал "Прерывание" определяет цикл из восьми импульсов. По сигналу "Прерывание" ячейка Д2ХК251 формирует подпачку из восьми импульсов "ИН" (импульс начала). Средний период повторения импульсов "ИН": Тср = 6,25 мс / 8 = 781,25 мкс.
"ИН" является импульсом запуска составного сигнала "МОНО+НЛЧМ+КС" формируемого ячейкой Д2ХК251.
Фронт сигнала "МОНО" совпадает с фронтом сигнала "Прерывание".
Фронт сигнала НЛЧМ задержан относительно фронта сигнала "МОНО" на 75 мкс.
Фронт КС задержан относительно фронта сигнала "МОНО" на 590 мкс.
Таким образом, выходной сигнал ячейки "F" представляет собой составной комбинированный сигнал из трех радиоимпульсов "МОНО+НЛЧМ+КС" на промежуточной частоте 30 МГц.
Закон модуляции сигнала НЛЧМ выбран со ступенчатой фазовой модуляцией.
2.7 Электрические параметры ячейки Д2ХК251
Электрическими параметрами ячейки являются:
- параметры входных сигналов приведены в таблице 1;
- напряжения питания ячейки:
а) цифровые +5 В;
б) аналоговые +5 и минус 5 В;
- параметры выходных сигналов приведены в таблице 2.
Таблица 1
| Название
|
Назначение
|
Откуда поступает
|
Параметры
|
| Вкл.ген.
|
Признак режима работы ячейки (основной/резервный)
|
Секция "ИП" (источник питания), синхронизации и контроля
|
Входной ток не менее 2 мА, активный уровень "логической 1"
|
| ПРК
|
Сигнал перехода системы в режим контроля
|
Блок 974ПП05М
|
Активный уровень "логической 1"
|
| А1
|
Признак разрешения формирования "контрольного сигнала" для приемного устройства
|
Секция "ИП", синхронизации и контроля
|
Активный уровень "логической 1"
|
| А2
|
Признак "подвижности" "контрольного сигнала" для приемного устройства
|
Секция "ИП", синхронизации и контроля
|
Активный уровень "логической 1"
|
| B1
|
Признак разрешения на формирование радиоимпульсных сигналов
|
Блок 974ПП05М
|
Активный уровень "логической 1"
|
| Прерывание
|
Сигнал внешней синхронизации
|
Секция "ИП", синхронизации и контроля
|
Активный уровень "логической 1"
|
| Авария вх.
|
Признак аварии ячейки Д2ХК251 другой частоты
|
Блок 974ГВ02
|
"логический 0" – авария, "логическая 1" – норма
|
| ТИ48 вх.
|
Внешний тактовый сигнал частотой 48 МГц (меандр)
|
Блок 974ГВ02
|
Нагрузка 51 Ом
|
Таблица 2
| Название
|
Назначение
|
Куда поступает
|
Параметры
|
| В2
|
Бланк контрольного сигнала для "приемного устройства"
|
Секция "ИП", синхронизации и контроля
|
Активный уровень "логической 1", нагрузка 51 Ом
|
| Бланк ЗУ
|
Бланк зондирующих радиоимпульсов МОНО, НЛЧМ и "контрольного сигнала" для приемного устройства
|
Блок 974ПП05М
|
Активный уровень "логической 1", нагрузка 51 Ом
|
| RхD
|
Импульсы синхронизации
|
Секция "ИП", синхронизации и контроля
|
Активный уровень "логической 1", нагрузка 51 Ом
|
| ТИ1.1
|
Тактовый сигнал частотой 5,2 кГц (меандр)
|
Блок 974ПП05М
|
Нагрузка 75 Ом
|
| Авария вых
|
Сигнал аварии ячейки ТТЛ уровня
|
Блок 974ГВ02
|
"логический 0" – авария, "логическая 1" – норма, нагрузка 75 Ом.
|
| ТИ48ки
|
Тактовый радиосигнал частотой 48 МГц (меандр)
|
Ячейка Д2ПУ047
|
Амплитуда не менее 1 В, нагрузка 51 Ом
|
| ТИ48вых
|
Тактовые сигналы частотой 48 МГц (меандр)
|
Блок 974ГВ02
|
Нагрузка 51 Ом
|
| F
|
Радиоимпульсные сигналы МОНО τ=(1,0±0,5) мкс, НЛЧМ τ=(64±4) мкс и радиоимпульсный НЛЧМ пилот-сигнал τ=(64±4) мкс
|
Блок 974ГМ01
|
Амплитуда (0,2±0,02) В на нагрузке 51 Ом, долговременная нестабильность частоты 10-4, подавление сигналов "F" в паузах не менее 80 дБ
|
| Авария Д2ХК251
|
Сигнал аварии ячейки
|
Секция "ИП", синхронизации и контроля
|
"логический 0" – авария, "логическая 1" – норма, нагрузка 75 Ом.
|
Блок 974ГМ01 – предназначен для формирования сигналов СВЧ для передающего устройства и формирования «контрольного сигнала» для приемного устройства
Ячейка Д2ПУ047 – предназначена для деления мощности входного сигнала 48 МГц на четыре выхода.
Примечания
1 Радиоимпульсы МОНО и НЛЧМ формируются при активном уровне сигнала "B1" (признака разрешения на формирование трех радиоимпульсных сигналов).
2 Радиоимпульс КС формируется на нерабочем участке дальности в азимутальном секторе и представляет собой сигнал в азимутально-дальномерном участке.
3 При активном уровне на входе ячейки сигнала "А1" и не активном уровне сигнала "А2" формируется третий радиоимпульс сигнала "F" с постоянной начальной фазой. При активном уровне на входе ячейки сигналов "А1" и "А2" формируется третий радиоимпульс сигнала "F", начальная фаза которого изменяется на 180°. При активном уровне сигнала "ПРК" сигнал "F" не вырабатывается.
2.8 Принцип работы ячейки Д2ХК251
При наличии на входе сигнала "Вкл ген.
" ячейка Д2ХК251 должна функционировать следующим образом:
- сигнал "Вкл ген.
" уровнем "логической 1":
1) формировать сигналы опорной частоты 48 МГц;
2) формировать радиоимпульсы и сигналы синхронизации;
3) не учитывать входные сигналы: "Авария вх.", "Прерывание", "ТИ48 вх";
- сигнал "Вкл ген.
" уровнем "логического 0":
1) отключать устройство формирования опорной частоты 48 МГц;
2) в качестве импульсов опорной частоты 48 МГц использовать входной сигнал на ячейку Д2ХК251 "ТИ48 вх";
3) при наличии на входе активного уровня импульса "Прерывание" формирование радиоимпульсов и сигналов синхронизации должно быть согласно вышеприведенным параметрам;
4) не формировать сигналы "RXD", "Авария вых.", "ТИ48 вых";
5) при наличии на входе сигнала "Авария вх.
" уровнем "логического 0" ячейка Д2ХК251 должна автоматически перейти в режим работы "ведущий", независимо от уровня сигнала "Вкл ген.
"
Заключение
За время прохождения производственной практики была изучена специальная литература, касающаяся принципов работы диспетчерских радиолокаторов и систем радиолокации в целом, конструкторская документация и технические условия эксплуатации конкретного диспетчерского радиолокатора, находящегося на этапе разработки института, при этом - более детальное рассмотрение прибора передатчика-приемника и входящего в него источника радиоволн. Кроме этого я ознакомилась с технологией и организацией производства, правилами техники безопасности и охраны труда.
Радиолокация представляет собой интереснейшую область для изучения, как средство расширения возможностей человека - определять наличие и положение объектов, габаритные, скоростные и другие характеристики на дальних расстояниях независимо от метеорологических условий и помех.
Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства.
Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в данной области и уже невозможно представить современных средств и методов защиты важнейших объектов и укрепления военной безопасности страны без специализированной техники, такой как радиолокационные системы.
Полученные при изучении разных дисциплин теоретические и практические знания были применены для выполнения задания руководителя и закреплены в ходе прохождения практики.
Список литературы
1. ГОСТ 12.0.003-74 ССБТ. Опасные и вредные производственные факторы. Классификация. М., 1999.
2. ГОСТ 12.1.004-91 Пожарная безопасность. Общие требования, М., 1992.
3. ГОСТ 21800-89 Системы вторичной радиолокации для управления воздушным движением, 1989г.
4. Долин П.А. "Справочник по технике безопасности", Москва, Энергоиздат, 1982г.
5. Основы радиолокации и телевидения. А.А.Немец, В.И.Федотов, Москва, Высшая школа, 1984г.
6. Радиолокационные системы. П.А. Бакулев, Москва, Радиотехника, 2004г.
|