Проектирование и исследование механизма крышкоделательной машины
Министерство образования Беларуси
Белорусский государственный технологический университет
кафедра теоретической механики
курсовой проект по теории механизмов и машин
тема: проектирование и исследование механизма крышкоделательной машины
выполнил студент
III курса 3 группы
факультета ИДиП
Дорошевич А. Н.
проверил доцент Бокун Г. С.
Минск 2004
1. Введение
Исследуемой мною в курсовом проекте крышкоделательная машина предназначена для изготовления книжных крышек.
Крышкоделательные машины широко используются в полиграфической промышленности. Изготовление книжных крышек – сложный технологический процесс, требующий высокоточного оборудования. К последним относится и исследуемый мною механизм.
Движение от электродвигателя передаётся кривошипу через планетарный редуктор и зубчатую передачу. Преобразование вращательного движения кривошипа в возвратно-поступательное движение поршня осуществляется шестизвенным кулисным механизмом, состоящим из кривошипа, кулисного камня, вращающейся кулисы, шатуна и ползуна.
Смазываются механизмы плунжерным масляным насосом кулачкового типа. Кулачок, закрепленный на одном валу с зубчатым колесом, приводит в движение толкатель. Для получения требуемой равномерности движения на кривошипном валу закреплён маховик.
Высокая точность исследуемой машины требует минимальных погрешностей при расчетах. С этой целью курсовая работа выполнена на листах формата А1 с применением в отдельных местах вычислительной мощи современных компьютеров и новейшего программного обеспечения.
II Динамический синтез рычажного механизма
2.1 Задачи и методы динамического синтеза и анализа машинного агрегата
Задачей динамического синтеза машинного агрегата является определение постоянной составляющей приведенного момента инерции маховика Iм
, при котором колебания угловой скорости звена приведения не превышает значений, обусловленных коэффициентом неравномерности движения δ.
Задачей динамического анализа машинного агрегата является определение закона движения звена приведения (ω1
, ε1
) при полученном значении Iм
. Методы расчета могут быть графические и аналитические.
2.2 Структурный анализ рычажного механизма
Степень подвижности рычажного механизма определяем по формуле:
W=3n–2p5
–p4
, где
n=5—число подвижных звеньев механизма;
p5
—число пар V класса;
p4
—число пар IV класса;
В данном механизме 7 пар пятого класса: A(0;1), B(1;2), C(2;3), D(3;0), E(3;4) — вращательные. B3
(2;3), Е0
(0;5) — поступательные. Пар четвертого класса нет. Тогда
W=3·5–2·7–0=1.
Следовательно, положение звеньев механизма определяется заданием одной обобщенной координаты звена 1(j1
).
Определим класса механизма. Для этого расчленим его на группы Ассура. Сначала отделяем группу Ассура II класса, образованную звеньями 4 и 5, затем отсоединяем группу Ассура II класса, образованную звеньями 2 и 3. остается ведущее звено и стойка 0, образующие механизм I класса.
Формула строения механизма I(0;1)®II(2;3)®II(4;5)
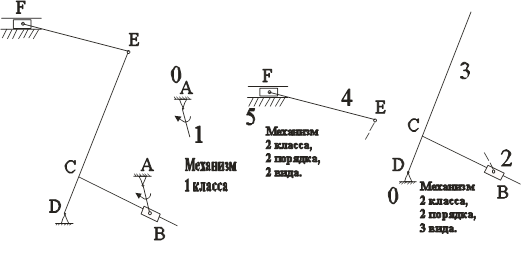
Класс присоединенных групп — второй, поэтому рассматриваемый механизм относится ко II классу.
2.3 Определение основных параметров и размеров
рычажного механизма.
Угловая скорость звена 1:  
Размеры механизма заданны в задании:
lAB
=0.22 м lCD
=0.19 м lDE
=0,86 м lEF
=0,8 м X=0.8 м
Y1
=0.3 м Y2
=0.5 м
2.4 Описание определения кинематических характеристик рычажного механизма
2.4.1 Построение планов положений
Для построения планов положений механизма выбираем масштабный коэффициент 
Тогда чертежные отрезки, изображающие звенья и расстояния на чертеже равны:
AB=lAB
/mS
=0.22/0.005=44 мм
CD=lCD
/mS
=0.19/0.005=38 мм
DE=lDE
/mS
=0.86/0.005=172 мм
EF=lEF
/mS
=0.8/0.005=160 мм
X=X/mS
=0.8/0.005=160 мм
Y1
=Y1
/mS
=0.3/0.005=60 мм
Y2
=Y2
/mS
=0.5/0.005=100 мм
Делим траекторию движения точки B кривошипа на 12 равных частей и строим 12 положений механизма.. На всех звеньях показываем положения центров масс. Центры масс находятся посередине: AS1
=0 мм. Центр масс кулисы CB находится посередине максимальной длины звена, которую определим из построений.
2.4.2 Построение планов аналогов скоростей
Требуется построить 12 планов аналогов скоростей и определить длины отрезков, изображающих анализ скоростей на планах. Построение производим по группам Ассура в соответствии с формулой строения механизма I(0;1)®II(2;3)®II(4;5).
Поскольку между скоростями точек и аналогами скоростей существует пропорциональность, то для построения планов воспользуемся векторными уравнениями для построения планов скоростей.
Для построения планов аналогов скоростей механизма выбираем масштабный коэффициент  ; ;
Переходим к построению плана аналога скоростей для группы Ассура (2;3’). Известна скорость точки B1
по величине и направлению. Скорость точки B3’
найдем, решив графически векторное уравнение:
 ; ;
Отрезок pb3
аналогичен скорости точки B3
. Для построения отрезка pс, изображающего аналог скорости точки С звена 3 воспользуемся теоремой подобия
 ; ; , ,
Направление 
Скорости точек E и S3
найдём из соотношений
 ; ;  , ,
Переходим к построению плана аналогов скоростей для групп Ассура (4;5). Известна скорость точки E. Найдем скорость точки F, рассматривая ее движение по отношению к точке E. Запишем векторное уравнение:

Отрезок pe изображает аналог скорости точки Е.
Для построения отрезка pS4
воспользуемся теоремой подобия.
 ; ;  . .
2.4.3 Расчет приведенного момента инерции Iпр
Приведенный момент рассчитывается по формуле:
 . .
В нашем случае эта формула примет вид:
 , где , где  ; ; ; ; ; ; ; ;
 . .
Из условия задания определяем:
Массы звеньев:





Моменты инерции звеньев:




После подстановки значений рассчитанных величин получим следующую формулу:

2.4.4 Расчет приведенных моментов сил
На входное звено крышкоделательной машины при рабочем ходе действует сила полезного сопротивления P n.с.=500 H.
Величину приведенного момента сил сопротивления определяем по формуле:



Определим постоянные величины, входящие в эту формулу





Для рабочего хода:

Для холостого хода:

2.4.5 Определение работы сил сопротивления Ас
График Ас(j) построим методом численного интегрирования, применяя метод трапеций. Формула интегрирования имеет вид:
 ; ;
где  — шаг интегрирования. — шаг интегрирования.
2.4.6 Построение диаграммы изменения кинетической энергии и диаграммы "энергия-масса"
График изменения кинетической энергии  построим путем вычитания ординат графика Ас
(j) из соответствующих ординат графика Ад
(j). После этого построим диаграмму Виттенбауера (неполная диаграмма"энергия-масса") путем графического исключения параметра j из графиков изменения кинетической энергии механизма и приведенного момента инерции. построим путем вычитания ординат графика Ас
(j) из соответствующих ординат графика Ад
(j). После этого построим диаграмму Виттенбауера (неполная диаграмма"энергия-масса") путем графического исключения параметра j из графиков изменения кинетической энергии механизма и приведенного момента инерции.
2.4.7 Определение момента инерции маховика
Для определения момента инерции маховика по заданному коэффициенту неравномерности движения следует провести касательные к графику "энергия-масса" под углами Ymax
и Ymin
к оси абсцисс (оси приведенного момента инерции).
Тангенсы этих углов определим по формулам:
 , Ymax
=88.45° , Ymax
=88.45°
 , Ymin
=88.28°. , Ymin
=88.28°.
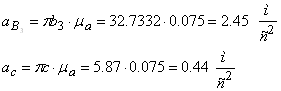
Диаметр маховика с тяжелым ободом:  . .
Для чугуна  ; ; ; ; , отсюда: , отсюда:
 ; ;
Mасса маховика:  ; ;
Ширина обода:  ; ;
Высота обода:  . .
2.4.8 Определение параметров маховика
Для построения графика w необходимо найти Iполн
и Т по формулам:
 ; ; . .
 ; ;
 ; ;
Имеем  . Определяем угловую скорость для всех положений механизма. По расчетным данным определяем среднюю угловую скорость: . Определяем угловую скорость для всех положений механизма. По расчетным данным определяем среднюю угловую скорость:

2.4.9 Расчет истинной угловой скорости звена приведения
Все расчёты и графики выполнены с использованием математического пакета MathCAD Professional 2001 и приведены ниже

 


III Динамический анализ рычажного механизма
3.1 Определение линейных и угловых скоростей, ускорений точек и звеньев механизма
Для построения плана механизма в 9-ом положении примем масштабный коэффициент  . .
Для построения плана скоростей определим скорость точки В

Определим масштабный коэффициент

Построение плана ведется в соответствии с векторными уравнениями, рассмотренными в пункте II.
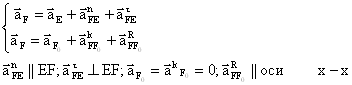
Переходим к построению плана ускорений. Так как кривошип вращается неравномерно, то ускорение точки В кривошипа равно:
 , где , где

Выбрав масштабный коэффициент  ,вычислим отрезки, изображающие aB1A
n
и aB1A
t ,вычислим отрезки, изображающие aB1A
n
и aB1A
t

Из полюса p откладываем отрезок pn1
||АВ, направленной к центру вращения, отрезок n1
b^АВ откладываем в направлении e1
.
Ускорение точки В3
найдем, решив графически систему векторных уравнений.
 ; ;
Кариолисово ускорение определяем по формуле

На плане ускорений оно изображается отрезком

Вектор нормального ускорения  равен: равен:

На плане ускорений изображается отрезком
 . .
Ускорение точки С найдем по теореме подобия

Ускорение точек E и S3
найдем из соотношений

Для определения ускорения точки F составим два векторных уравнения.
В этих уравнениях aF0
=0 и  =0, так как направляющая XX неподвижна. =0, так как направляющая XX неподвижна.

Действительные ускорения точек и звеньев равны:



3.3 Расчет сил, действующих на звенья механизма
Определим силы тяжести звеньев, главные векторы и главные моменты сил инерции звеньев.
Звено 1:
Mu1
=(Is1
+Iм
) ×e1
=(1.836+12.143)×2.42=33.82919 H×м
Звено 2:
G2
=0;
Pu2
=0;
Mu2
=0.
Звено 3:
G3
=m3
g= ; ;
Pu3
=m3
×aS3=1.26 H
Mu
=IS3
×e3
=0.56 H×м
Звено 4:
G4
=m4
g=84.366H;
Pu4
=m4
×aS4
=7.74 H
Mu4
=IS4
×e4
=0.23 H×м
Звено 5:
G5
=m5
g=78.48 H;
Pu5
=m5
×aЕ
=9.6 H
Mu5
=0.22
Звено 6:
G6
=6m5
g=470.088
Pu6
=m6
×a6
=101.28.5
К звену 6 приложена сила Pc
=500 Н.
3.4 Определение значений динамических реакций в кинематических парах групп Ассура
Отсоединяем группу Ассура (4,5). Прикладываем к ней силу сопротивления, силы тяжести, силы инерции и момент сил инерции. Действие отброшенных звеньев заменяем реакциями  и и  . Реакцию представляем в виде: . Реакцию представляем в виде:

а реакцию  направим перпендикулярно направляющей ползуна 5. направим перпендикулярно направляющей ползуна 5.
Составляющую  найдём из условия найдём из условия


 Н. Н.
Для определения реакций  и и  запишем уравнение равновесия группы Ассура (4,5): запишем уравнение равновесия группы Ассура (4,5):

Принимаем масштаб плана сил 
Строим план сил группы(4,5):
Отрезки ,изображающие силы на плане:




Из плана сил находим:


Реакцию во внутренней кинематической паре найдём, рассмотрев равновесие звена 4

Отсоединяем группу Ассура (2,3). Прикладываем реакцию  , силы тяжести, силы инерции, моменты сил инерции. Действие отброшенных звеньев заменяем реакциями , силы тяжести, силы инерции, моменты сил инерции. Действие отброшенных звеньев заменяем реакциями  и и  . .
Реакцию  направляем перпендикулярно звену BC и найдём её из условия: направляем перпендикулярно звену BC и найдём её из условия:


Уравнения равновесия группы (2,3)

Принимаем масштаб сил 
Строим план сил группы(2,3):
Отрезки изображающие силы на плане:




Из плана сил находим:

Реакцию во внутренней кинематической паре

Уравнение равновесия звена 1

Принимаем масштаб сил 
Отрезки изображающие силы на плане:


Из плана сил находим
 ; ;
Сравнение результатов


IV. Проектирование зубчатых механизмов.
4.1 Проектирование планетарного редуктора
Параметры редуктора:

Формула Виллиса

откуда

Полученное соотношение представим в виде
 , ,
в результате чего числа будут пропорциональны соответственно числам a,b,c,d. будут пропорциональны соответственно числам a,b,c,d.
Чтобы обеспечить условие соосности

вводим дополнительный множитель следующим образом

откуда следует, что
 
где q-коэффициент пропорциональности.
Рассмотрим следующие варианты:
 
Принимаем для расчётов вариант 1.
Проверка z1
=50>17; z2
=60>17; z’2
=22≥20; z3
-z’2
=110>8.
Останавливаемся на этом варианте.
Условие соседства
Принимаем к = 3.
Проверяем передаточное отношение

Условие сборки
где D-наибольший общий делитель чисел z2
=60 и z’2
=22; D=2.
 -любое целое число -любое целое число
Условие сборки выполняется.
Делительные начальные диаметры колёс редуктора:
d1
=m∙z1
=50∙2=100
d2
=m∙z2
=2∙60=120 мм;
d’2
=m∙z’2
=2∙22=44 мм;
d3
=m∙z3
=2∙132=264 мм;
На листе 3 в масштабе 1:2 вычерчиваем схему редуктора в двух проекциях.
4.2 Построение картины эвольвентного зацепления
Рассчитаем размеры зубчатых колёс с числами зубьев zI
=za
=13 и zII
=zb
=19 со свободным выбором межосевого расстояния, нарезаемых стандартной инструментальной рейкой модуля m=3 мм (α=20˚;h*
a
=1;c*
=0.25).
Минимальные коэффициенты смещения


Делительные диаметры
dI
=m∙zI
=3∙13=39 мм;
dII
=m∙zII
=3∙19=57 мм;
Делительное межосевое расстояние
a=0.5∙(dI
+dII
)=0.5∙(39+57)=48 мм.
Угол зацепления

По таблице инвалют находим угол 
Межосевое расстояние 

Диаметры основных окружностей
dbI
= dI
cosα=39∙0.9397=36.65 мм;
dbII
= dII
cosα=57∙0.9397=53.56 мм;
Диаметры начальных окружностей


Диаметры окружностей впадин


Высота зуба

Диаметры окружностей вершин


Окружной делительный шаг
P=π∙m=3.14∙3=9.424 мм;
Угловые шаги колёс

Окружные делительные толщины зубьев

Окружные толщины зубьев по вершинам


Коэффициент перекрытия

На листе 3 в масштабе 10:1 строим картину эвольвентного зубчатого зацепления.
Из построений находим коэффициент перекрытия:
V. Синтез кулачкового механизма
5.1 Задачи и методы синтеза кулачкового механизма
Задачами синтеза кулачкового механизма являются:
a) определение основных размеров кулачкового механизма, в нашем случае радиуса основной шайбы Ro и эксцентриситета;
b) построение профиля кулачка.
Задачи синтеза могут быть решены аналитическими или графическими методами.
5.2 Исходные данные
Исходные параметры механизма приведем в таблице:
| Ход толкателя H, м
|
Фазовые углы
|
υдоп.
|
Законы движения
|
| φу.
|
φд.с.
|
φв.
|
При удалении
|
При возвращении
|
| 0.06
|
90
|
20
|
60
|
28
|
Закон Шуна
|
Закон Шуна
|
5.3 Определение основных размеров кулачкового механизма
5.3.1.Построение кинематических диаграмм законов движения толкателя.
Рабочий угол  кулачка: кулачка:
 90º+20+60º=170º; 90º+20+60º=170º;
Переведем его в радианы:
 ; ;
Фазовые углы в радианах равны:
 ; ;
 ; ;
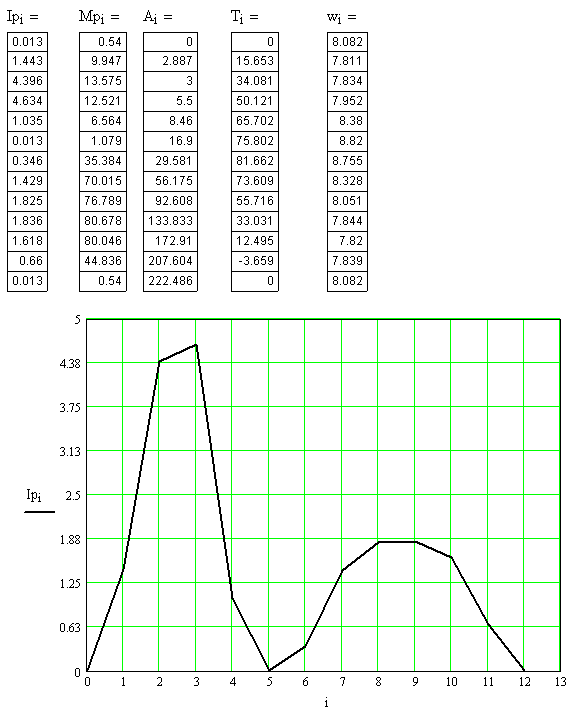
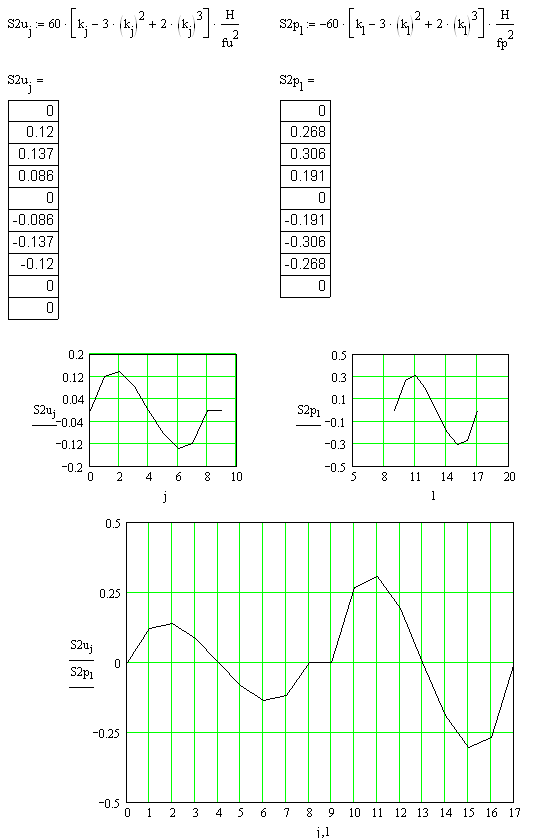
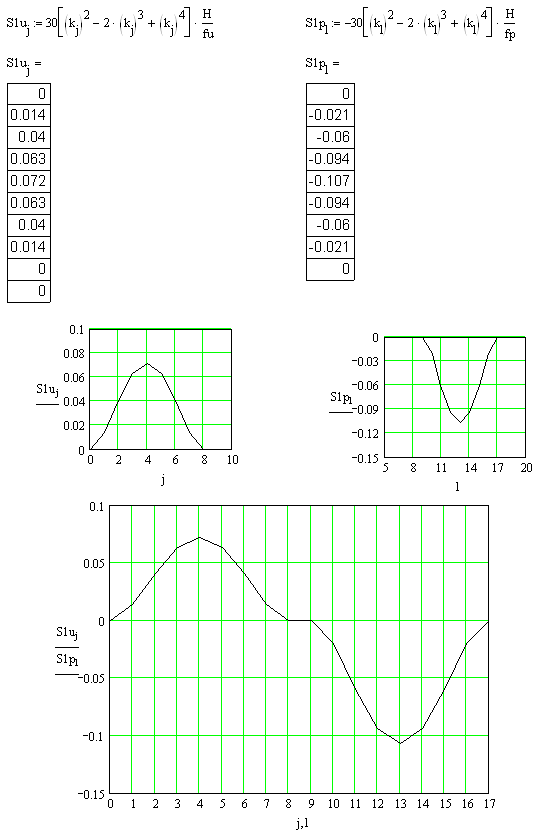
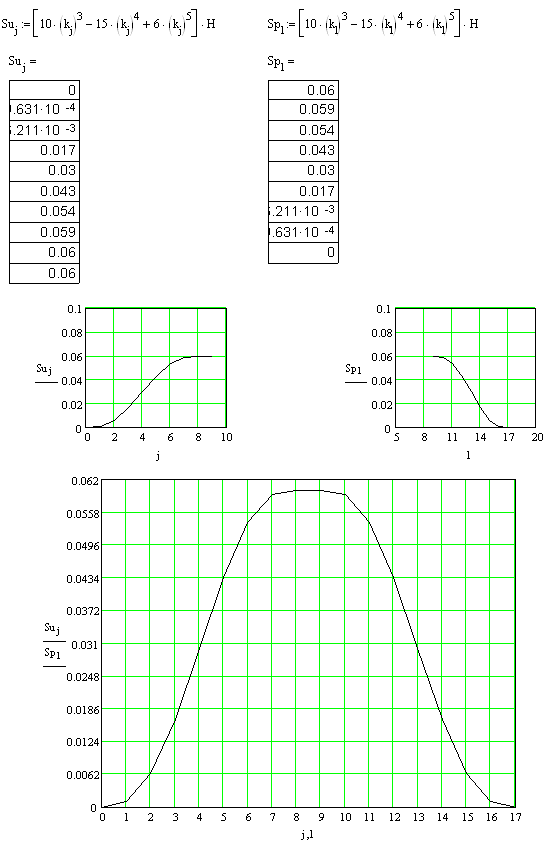
Графики зависимости ускорения, скорости и перемещения толкателя от угла поворота построим аналитическим методом, используя формулы, описывающие закон движения Шуна.
График зависимости ускорения толкателя от угла поворота кулачка:

Расчёты выполним с помощью пакета MathCAD 2001 professional:


5.3.2 Определение минимального радиуса кулачка
Минимальные размеры кулачка определяются из условия, что угол давления в проектируемом механизме во всех положениях не превышает заданного максимально допустимого угла  . Для этого строим совмещенную диаграмму . Для этого строим совмещенную диаграмму  , которая получается из диаграмм , которая получается из диаграмм  и и  путем графического исключения угла путем графического исключения угла  . К построенному графику проводим касательные под углом к оси . К построенному графику проводим касательные под углом к оси  . Точка пресечения . Точка пресечения  этих касательных определяет положение оси вращения кулачка, имеющего наименьший радиус-вектор этих касательных определяет положение оси вращения кулачка, имеющего наименьший радиус-вектор  . Проведя прямую на расстоянии e от оси . Проведя прямую на расстоянии e от оси  , найдем точку пересечения , найдем точку пересечения  этой прямой с касательной. Принимаем эту точку за ось вращения кулачка. Наименьший радиус-вектор равен: этой прямой с касательной. Принимаем эту точку за ось вращения кулачка. Наименьший радиус-вектор равен:
 ; ;
5.4 Построение профиля кулачка
Выбираем масштабный коэффициент  . .
Проводим две окружности радиусами  и e, затем вертикальную линию, касательную к окружности радиуса e — линию движения толкателя. Радиус ролика выбирается наименьшим из двух условий: и e, затем вертикальную линию, касательную к окружности радиуса e — линию движения толкателя. Радиус ролика выбирается наименьшим из двух условий:
 ; ;
где  -наименьший радиус кривизны профиля кулачка. -наименьший радиус кривизны профиля кулачка.
Принимаем  . .
Выбираем на центровом профиле ряд точек, из которых проводим окружности радиусом  . Огибающая этих окружностей есть действительный профиль кулачка. . Огибающая этих окружностей есть действительный профиль кулачка.
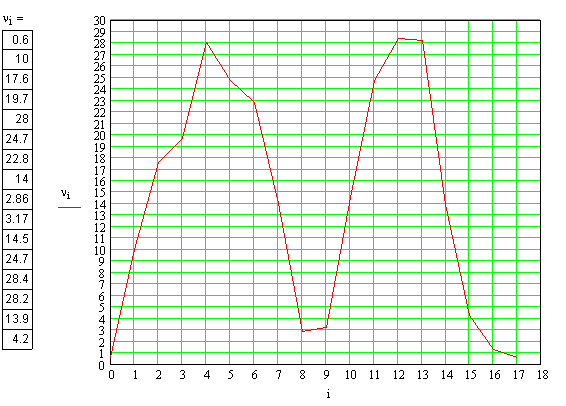
5.5 Определение зависимости угла давления от угла поворота кулачка
Расчет производим по формуле:
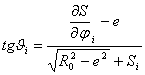
Данные расчёта сводим в таблицу .
Таблица 4.2.
| № пол
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
|
0
|
11.25
|
22.5
|
33.75
|
45
|
56.25
|
67.5
|
78.75
|
90
|
| 
|
0.6º
|
10º
|
17.6º
|
19.7º
|
28º
|
24.7º
|
22.8º
|
14º
|
2.86º
|
| № пол
|
9
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
|
|
110
|
117.25
|
124.5
|
131.75
|
139
|
146.25
|
153.5
|
162.75
|
170
|
|
|
3.17º
|
14.5º
|
24.7º
|
28.4º
|
28.2
|
13.9
|
4.2º
|
1.3º
|
0.6º
|
Список использованной литературы:
1. Г. Н. Девойно. Курсовое проектирование по теории механизмов и машин. Минск. Вышэйшая школа. 1986.
2. С. А. Попов, Г. А. Тимофеев. Курсовое проектирование по теории механизмов и машин. Высшая школа. Минск. 1998
3. И. И. Артоболевский. Теория механизмов и машин. Москва. Наука. 1988.
|