Предмет:
"Теория автоматического управления"
Тема:
"Устойчивость движения в нелинейных системах"
1. Общие понятия и определения
При анализе устойчивости движений в нелинейных системах исследуют устойчивость в особых точках, характеризующих равновесные состояния и на предельных циклах, характеризующих автоколебания. Если в линейных системах работоспособными оказываются только устойчивые системы, то в нелинейных системах наличие автоколебаний является нормальным режимом ее функционирования.
Рассмотрим некоторые понятия об устойчивости движения в нелинейных системах. Существенный вклад в развитие теории нелинейных систем внес А.М. Ляпунов.
Устойчивость в малом
– устойчивость при малых отклонениях. Для определения устойчивости в малом используют первый метод Ляпунова – метод линеаризации.
Устойчивость в целом
– устойчивость, которая не зависит от величины начальных условий. Для определения устойчивости в целом используют второй (или прямой) метод Ляпунова.
2. Исследование устойчивости движения в окрестности особых точек
Ляпунов сформулировал теоремы об устойчивости линеаризованных систем. Движение в окрестности особой точки может быть асимптотически устойчивым (рис. 1а) или устойчивым в смысле Ляпунова (рис. 1б).

а) б)
Рис. 1
Пусть имеется особая точка в начале координат. Устойчивость определяется в окрестности этой точки.
Если может быть найдена такая окрестность -e, чтобы движение, начавшись в пределах окрестности, заканчивалось в точке, характеризующей состояние равновесия, то такое движение называется асимптотически устойчивым.
Если внутри окрестности точки может быть найдена такая область, чтобы движение, начавшись вблизи окрестности, заканчивалось в пределах области точки, то такое движение называется устойчивым по Ляпунову.
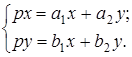
Рассмотрим нелинейную систему второго порядка, которая описывается системой уравнений:
 (1) (1)
Условие особых точек:
 (2) (2)
Каждое из этих уравнений может быть представлено в виде линии на плоскости x0y. Если система линейная (рис. 2а), то оба уравнения линейны и линии пересекаются в одной (особой) точке, которая расположена, как правило, в начале координат. Для нелинейных систем (рис. 2б) каждое уравнение это уравнение кривой. Они могут пересекаться в нескольких точках, т.е. особых точек может быть сколь угодно.
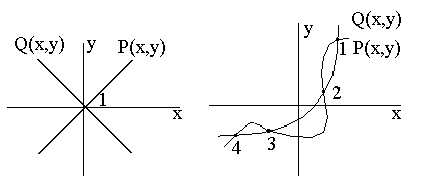
Рис. 2Для определения устойчивости в окрестности какой-либо точки можно воспользоваться методом линеаризации.
 (3) (3)
Переходим к уравнениям в изображениях
 (4) (4)
где  - постоянные коэффициенты, при этом x = x0,
аy = y0
. - постоянные коэффициенты, при этом x = x0,
аy = y0
.
Система линеаризованных уравнений
 (5) (5)
Исключив одну переменную, можно получить уравнение второго порядка
 (6) (6)
Для определения устойчивости анализируем корни характеристического уравнения
 (7) (7)
Если корни характеристического уравнения расположены в левой полуплоскости, то линеаризованная система устойчива, а соответствующая ей исходная нелинейная система асимптотически устойчива в окрестности, рассматриваемой особой точки.
Если корни расположены в правой плоскости, то линеаризованная система неустойчива, а движение в окрестности особой точки является неустойчивым.
Если корни расположены на мнимой оси, то линеаризованная система не устойчива, а для определения устойчивости нелинейной системы необходимо провести дополнительные исследования нелинейной системы, т.е. уравнения в первом приближении не дают точного представления об устойчивости нелинейной системы.
3. Второй (прямой) метод Ляпунова
Если хотя бы один из корней характеристического уравнения расположен на мнимой оси, то первый метод Ляпунова не дает ответа на вопрос об устойчивости движения в окрестности особой точки, при этом используется второй (прямой) метод Ляпунова, позволяющий определить устойчивость в большом.
Метод основан на использовании специальных функций, называемых функциями Ляпунова. Чтобы выяснить смысл функций Ляпунова рассмотрим фазовый портрет в окрестности некоторой особой точки (рис. 3). Рассмотрим радиус – вектор -r, который изменяется по модулю в функции времени.
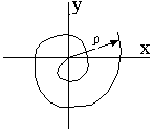
Рис. 3
Если при  , то движение асимптотически устойчиво. , то движение асимптотически устойчиво.
Если при  увеличивается увеличивается , то движение не устойчиво. , то движение не устойчиво.
Если при  const const , то движение устойчиво в смысле Ляпунова. , то движение устойчиво в смысле Ляпунова.
Ляпунов доказал, что надо найти такую произвольную функцию H (x, y), которая бы играла роль радиус-вектора r, и была бы положительной для всех точек за исключением, быть может, начала координат, где она может быть равной нулю. Такая функция называется функцией Ляпунова
.
Знакоопределенной
функцией называется функция, которая при всех значениях аргументов за исключением, может быть, начала координат, где она равна нулю, имеет определенный знак (рис. 4а).
Знакопостоянной
функцией называется функция, которая при всех значениях аргументов (за исключением нескольких точек, где она равна нулю) сохраняет постоянный знак (рис. 4б).
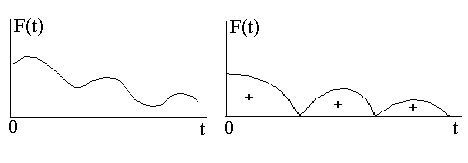
а) б)
Рис. 4
4. Теоремы Ляпунова об устойчивости нелинейных систем
1. Если можно найти такую знакоопределенную функцию H (x, y), что  тоже знакоопределенная функция противоположного знака, то движение в окрестности рассматриваемой особой точки асимптотически устойчиво. тоже знакоопределенная функция противоположного знака, то движение в окрестности рассматриваемой особой точки асимптотически устойчиво.
2. Если можно найти такую знакоопределенную функцию H (x, y), что будет знакопостоянной функцией противоположного знака, то движение в окрестности рассматриваемой особой точки будет устойчивым в смысле Ляпунова.
3. Если существует такая функция H (x, y) > 0, что > 0, то такое движение неустойчиво.
Эти теоремы характеризуют достаточные условия устойчивости движения в нелинейных системах. Функции Ляпунова выбираются в виде квадратичных функций или квадратичная функция плюс интеграл исходя из того, что
 (8) (8)
Это самое слабое место метода, так как нет способа выбора функций Ляпунова, ее выбор представляет трудности, надо полагаться на интуицию и некоторые рекомендации.
Рассмотрим примеры анализа устойчивости движения в окрестности особых точек с использованием методов Ляпунова.
Пример 1.
Пусть задана схема нелинейная система (рис. 5). Определить особые точки и проанализировать их устойчивость, если нелинейные звенья описываются функциями: f(x) = x3
, f(y) = y3
.
Рис. 5
Решение
Запишем дифференциальные уравнения системы

Определим особые точки системы (рис. 6).
Рис. 6
Используем для анализа устойчивости 1-ый метод Ляпунова (метод линеаризации или метод оценки устойчивости по первому приближению).
Выполним линеаризацию:
Перейдем к изображениям:
 . .
Корни характеристического уравнения линеаризованной системы расположены на мнимой оси, т.е. для определения достаточного условия устойчивости применим 2-ой метод Ляпунова.
Необходимо найти функцию Ляпунова (т.е. знакоопределенную функцию Н (x, y) > 0). Пусть  . .
Найдем производную:

Это знакоопределенная функция отрицательного знака, следовательно, состояние равновесия асимптотически устойчиво.
Пример 2.
Дана система (рис. 7). Проанализировать устойчивость особых точек.
Рис. 7
Решение
Запишем исходные уравнения нелинейной системы:

Определим особые точки и проанализируем их устойчивость:

Используем 1-й метод Ляпунова (линеаризации) или метод устойчивости по первому приближению. Можно линеаризовать либо уравнение, либо систему уравнений.
1). Линеаризуем уравнение

2). Линеаризуем систему

Поскольку один из корней находится на границе устойчивости, то для того, чтобы определить достаточное условие устойчивости необходимо использовать 2-й метод Ляпунова. Необходимо найти знакоопределенную функцию H (x, y) > 0. Выбираем функцию Ляпунова в виде "квадратичная форма плюс интеграл" и находим ее производную.

Состояние равновесия устойчиво по Ляпунову, так как < 0 при всех значениях y и не зависит от х, т.е. х = 0, так как производная функции Ляпунова не включает координату х, то она знакопостоянная.
Пример 3. Для заданной системы (рис. 8) определить особые точки и проанализировать их устойчивость.
Рис. 8
Решение
Запишем исходные уравнения:
Определим устойчивость по второму методу Ляпунова. Выбираем функцию Ляпунова в виде

Найдем производную:

Так как  º0 во всем фазовом пространстве, то состояние равновесия устойчиво по Ляпунову. Фазовый портрет представляет семейство эллипсов. Особая точка типа "центр". º0 во всем фазовом пространстве, то состояние равновесия устойчиво по Ляпунову. Фазовый портрет представляет семейство эллипсов. Особая точка типа "центр".
Пример.
Для заданной системы (рис. 9) определить особые точки и проанализировать их устойчивость
Запишем исходные уравнения:

|
|
 x x
Определим устойчивость по 2-му методу Ляпунова. Выбираем функцию Ляпунова в виде "квадратичная функция плюс интеграл":
Эта система называется абсолютно устойчивой, т.е. она устойчива для любого типа нелинейного элемента, лишь бы его характеристика находилась в секторе z = 0; z = kx.
Пример 5. Для заданной системы (рис. 10) найти особые точки и определить их устойчивость, если f(x) = x+3x2
.
Решение
Запишем выражение для выходной величины
Запишем дифференциальное уравнение системы


Подставим в дифференциальное уравнение

Линеаризуем полученное нелинейное уравнение. Найдем уравнение установившегося режима


Получили два состояния равновесия, проанализируем их устойчивость.
При x0
= 0; 
Характеристическое уравнение s3
+s2
+2s+1 = 0 по Гурвицу не содержит корней в правой полуплоскости (2×1>1), следовательно, состояние равновесия устойчиво.
При x0
= -1/3; 
Характеристическое уравнение системы s3
+s2
–1 = 0 по Гурвицу содержит корни в правой полуплоскости, следовательно, состояние равновесия не устойчиво.
Устойчивость движения в предельных циклах
Предельные циклы характеризуют режимы автоколебаний. Для анализа устойчивости автоколебаний вводится понятие орбитальной устойчивости.
Пусть имеем предельный цикл, вблизи которого выбираем окрестность -e, представляющую криволинейный цилиндр (рис. 12).
Если может быть выбрана такая окрестность -e, чтобы движение, начавшись в пределах окрестности, сколь угодно близко приближалось к предельному циклу, то такое движение называется орбитально-асимптотически устойчивым.

Рис. 12
Если внутри окрестности предельного цикла может быть найдена такая область, чтобы движение, начавшись вблизи окрестности, заканчивалось в пределах области, то такое движение называется орбитально-устойчивым по Ляпунову.
Для определения автоколебаний их устойчивости и параметров существует ряд методов: метод точечных преобразований, метод гармонической линеаризации и др.
5. Метод точечных преобразований
Метод точечных преобразований позволяет определить наличие предельных циклов и их устойчивость.
Идея метода
. Пусть задана фазовая траектория, выбираем линию, которая пересекает фазовую траекторию (рис. 13). Обычно это отрезок оси – 0х. Пусть начальное положение, изображающие точки на оси 0х –  . .

Рис. 13 Рис. 14
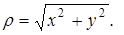
За один оборот начальная точка траектории М () переходит в конечную точку М ( ), которая является начальной для следующего оборота M( ), которая является начальной для следующего оборота M( ). Таким образом, можно построить зависимость конечных значений изображающей точки от начальных, т.е. так называемую кривую точечного преобразования (рис. 14). Эта кривая позволяет определить наличие предельных циклов и их устойчивость. Точка пересечения кривой точечного преобразования с линией под углом 45° характеризует наличие предельного цикла. При этом = (рис. 15а). ). Таким образом, можно построить зависимость конечных значений изображающей точки от начальных, т.е. так называемую кривую точечного преобразования (рис. 14). Эта кривая позволяет определить наличие предельных циклов и их устойчивость. Точка пересечения кривой точечного преобразования с линией под углом 45° характеризует наличие предельного цикла. При этом = (рис. 15а).
Возьмем точку справа от цикла:  , т.е. колебания будут затухать (рис. 15б). Возьмем точку слева от цикла: , т.е. колебания будут затухать (рис. 15б). Возьмем точку слева от цикла:  , т.е. колебания будут увеличиваться по амплитуде (рис. 15в). , т.е. колебания будут увеличиваться по амплитуде (рис. 15в).
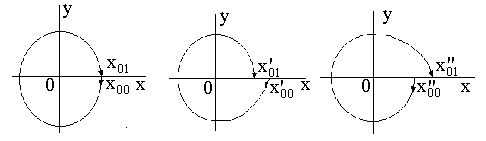
a) б) в)
Рис. 15
Таким образом, рассматриваемый цикл будет устойчивым. Устойчивость можно определить по направлению стрелок точечного преобразования.
Пример 6. Пусть задана кривая точечных преобразований (рис. 16). При этом фазовый портрет представлен на рис. 17.
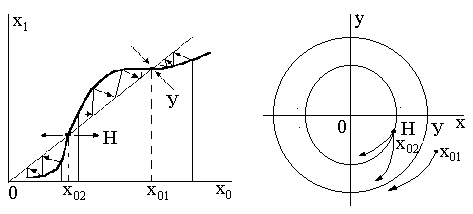
Рис. 16 Рис. 17
Литература
1. Грумондз В.Т. Динамика нелинейных систем: Некоторые задачи устойчивости и колебаний – 2-е изд. Вуз. книга, 2009. – 182c.
2. Мирошник И.В. Теория автоматического управления: Нелинейные и оптимальные системы. Издательство: ПИТЕР, 2006. – 272c.
3. Пащенко Ф.Ф. Введение в состоятельные методы моделирования систем. В 2-х ч. Ч. 2. Идентификация нелинейных систем Изд-во: ФИНАНСЫ И СТАТИСТИКА, 2007. – 288c.
4. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В.А. Бесекерского. – M.: Наука, 1978.
|