| Содержание
Введение
1. Задачи динамического исследованиямеханизмов
2. Силы в механизмах
3. Силы инерции
4. Кинетостатический расчет механизмов
5. Теорема Н.Е. Жуковского
Литература
механизм сопротивление инерция кинетостатический
Введение
Тема контрольной работы «Динамический анализ механизмов» по дисциплине «Теория механизмов и машин».
Цель: формирование знаний динамического анализа механизмов.
Задачи: ознакомится с методами динамического анализа механизмов.
В работе рассмотрены вопросы темы:
- Задачи динамического исследования механизмов;
- Силы в механизмах;
- Силы инерции;
- Кинетостатический расчет механизмов;
- Теорема Н.Е.Жуковского о жестком рычаге.
1. Задачи динамического исследования механизмов
Основными задачами динамики механизмов являются:
1) определение сил, действующих в кинематических парах механизма;
2) определение сил трения и их влияние на работу механизма;
3) определение закона движения механизма, находящегося под действием определенных сил;
4) выявление условий, обеспечивающих заданный закон движения механизма;
5) уравновешивание механизмов.
Для решения первой задачи проводится силовое исследование механизма.
2. Силы в механизмах
Основными силами, определяющими характер движения механизма, являются движущие силы, совершающие положительную работу, и силы полезного (производственного) сопротивления, возникающие в процессе выполнения механизмом полезной работы и совершающие отрицательную работу. К движущим силам относятся: сила давления рабочей смеси на поршень цилиндра двигателя, момент, развиваемый электродвигателем на ведущем валу насоса или компрессора и т.д.
Силы полезного сопротивления – это те силы, для преодоления которых предназначен механизм. Такими силами являются: силы сопротивления резанию в токарном станке и т.д. Кроме этих сил необходимо учитывать также силы сопротивления среды, в которой движется механизм, и силы тяжести звеньев, производящие положительную или отрицательную работу в зависимости от направления движения центра тяжести звеньев – вниз или вверх.
При расчете механизма все движущие силы полезного сопротивления должны быть заданы – так называемые задаваемые силы. Задаются эти силы обычно в виде механических характеристик.
Механической характеристикой двигателя или рабочей машины называют зависимость момента, приложенного к ведомому валу двигателя или ведущему валу рабочей машины, от одного или нескольких кинематических параметров. Механические характеристики определяют экспериментальным путем или же при помощи различных математических зависимостей.
При работе механизма в результате действия всех приложенных к его звеньям указанных сил в кинематических парах возникают реакции, которые непосредственно не влияют на характер движения механизма, но на поверхностях элементов кинематических пар вызывают силы трения. Эти силы являются силами вредного сопротивления.
Реакции в кинематических парах возникают не только вследствие воздействия внешних задаваемых сил на звенья механизма, но и вследствие движения отдельных масс механизма с ускорением, что может вызвать дополнительные динамические нагрузки в кинематических парах.
Поэтому, задача кинематического расчета состоит в определении реакций в кинематических парах механизмов или, иначе говоря, давлений, возникающих в местах соприкосновения элементов кинематических пар, а также в определении уравновешивающих моментов или уравновешивающих сил.
Под уравновешивающими силами или моментами понимают те неизвестные и подлежащие определению силы или моменты, приложенные к ведущим звеньям, которые уравновешивают систему всех внешних сил и пар сил и всех сил инерции и пар сил инерции.
Если в машине, в процессе работы, ускорение звеньев достигает незначительной величины, то определение реакций в кинематических парах производится из условия равномерного движения всех звеньев механизма по условиям равновесия статики:
∑ Fi=0; ∑ M (Fi)=0.
В случае, если ускорение звеньев в машине достигает значительной величины, то на звенья действуют динамические нагрузки, которыми пренебрегать уже нельзя. Для силового расчета в этом случае следовало бы составить динамическое уравнение движения, что весьма затруднительно.
Поставленную задачу можно решить, используя принцип Даламбера, согласно которому, если к звеньям механизма вместе со всеми силами приложить еще и инерционные силы, то механизм можно рассматривать находящимся в статическом равновесии, и уравнение динамики заменить уравнениями статики:
∑ Fi=0;
∑ M (Fi) + ∑ M (Fu) + Mu=0
3. Силы инерции
В общем случае плоско-параллельного движения звена ускорения его различных материальных точек различны (по величине и направлению). Поэтому различны и элементарные силы инерции  , условно приложенные в этих точках. Эта система элементарных сил сводится к одной силе инерции Fu и к одной паре сил инерции с моментом Mu, которые равны: , условно приложенные в этих точках. Эта система элементарных сил сводится к одной силе инерции Fu и к одной паре сил инерции с моментом Mu, которые равны:
где: m – масса звена;
WS - ускорение центра тяжести звена;
ε – угловое ускорение звена;
IS – момент инерции звена относительно оси, проходящей через центр тяжести.
Момент инерции звена есть мера инертности звена во вращательном движении. Его величина зависит только от самого тела: от его массы и распределения массы. Момент инерции в общем случае определяется формулой:
где: ρ – расстояние каждой элементарной массы от оси, проходящей через центр тяжести.
Сила инерции Fu приложена в центре тяжести звена S и направлена противоположно вектору ускорения центра тяжести WS.
Момент пары сил инерции направлен противоположно угловому ускорению звена ε.
Рассмотрим, к чему сводятся силы инерции при различных случаях движения звена.
1. Поступательное движение звена (рис.1).
Ускорения всех точек одинаковы, поэтому:
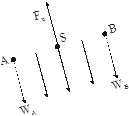
Рис.1
Приложена сила инерции в центре тяжести. Момент сил инерции звена Mu=0, т.к. при поступательном движении звена оно не имеет углового ускорения (ε=0).
2. Звено неравномерно (ε≠0) вращается вокруг оси, проходящей через центр тяжести (рис.2).
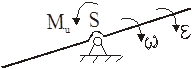
Рис.2
Сила инерции в этом случае равна Fu=0, т.к. ускорение центра тяжести WS=0.
Момент силы инерции равен: Mu=-IS·ε и направлен противоположно угловому ускорению ε.
3. Звено равномерно (ε=0) вращается вокруг оси, не проходящей через центр тяжести (рис.3).
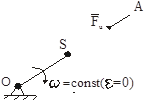
Рис.3
В этом случае:  где: где:  . .
Момент сил инерции Mu=0, так как угловое ускорение ε=0.
4. Звено равномерно (ε=0) вращается вокруг оси, проходящей через центр тяжести (рис.4).

Рис.4
В этом случае сила инерции Fu=0, т.к. аS=0 и момент инерции µu=0 (т.к. ε=0).
Такое звено называется уравновешенным.
5. Звено неравномерно вращается вокруг оси, не проходящей через центр тяжести.
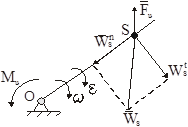
Рис.5
В этом случае возникает и сила инерции и момент сил инерции:
где:  ; по величине ; по величине 
Сила инерции приложена в центре тяжести и направлена противоположно ускорению центра тяжести WS. Момент пары сил инерции Mu направлен противоположно угловому ускорению.
Часто удобно силу инерции Fu и момент инерции Mu привести к одной равнодействующей силе Fu (рис.6). Для этого заменим момент Mu парой Fu и -Fu, момент которой равен: Fu·h=Mu.
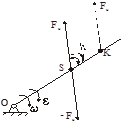
Рис. 6
Силу -Fu этой пары приложим в центре тяжести S. Тогда другая сила окажется приложенной в некоторой точке «К» звена. Силы Fu и -Fu, приложенные в центре тяжести взаимно уравновешиваются, и, таким образом, остается только одна сила, приложенная в точке «К» звена. Эта точка называется точкой качания.
Положение точки качания определим из уравнения:
но: 
тогда:  ; ;
Окончательно:  ; ;
Величина ℓSK для данного звена является величиной постоянной, не зависящей от его положения. Точка К всегда дальше от оси вращения, чем центр тяжести S.
6. Общий случай плоско-параллельного движения звена (рис.7).
Сила инерции:  . .
Сложное движение состоит из 2-х движений: из поступательного движения звена вместе с точкой А и вращательного движения звена относительно точки А. В соответствии с этим ускорение центра тяжести складывается из 2-х ускорений:  . .
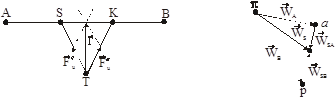
Рис.7
Тогда силы инерции звена в поступательном движении:
и силы инерции во вращательном движении:
Сила инерции в поступательном движении  проходит через центр тяжести и направлена противоположно проходит через центр тяжести и направлена противоположно  .Сила инерции в относительном вращательном движении .Сила инерции в относительном вращательном движении  при учете момента сил инерции Мu проходит через точку качания «К» и направлена противоположно ускорению при учете момента сил инерции Мu проходит через точку качания «К» и направлена противоположно ускорению  . Следовательно сила . Следовательно сила  , являясь суммой сил , являясь суммой сил  и и  , проходит через точку пересечения Т линий действия этих сил и направлена противоположно ускорению центра тяжести WS. , проходит через точку пересечения Т линий действия этих сил и направлена противоположно ускорению центра тяжести WS.
Для определения силы Fu и точки её приложения силы  и находить не следует. и находить не следует.
Для определения точки Т следует из центра тяжести S провести прямую, параллельную ускорению  , а через точку качания К - параллельную ускорению , а через точку качания К - параллельную ускорению  . Точка пересечения этих прямых и есть точка Т, через которую проходит сила инерции: . Точка пересечения этих прямых и есть точка Т, через которую проходит сила инерции: . .
Положение точки К для всех положений звена одинаково.
4. Кинетостатический расчет механизмов
Силовой расчет механизмов ведем в предположении, что трение в кинематических парах отсутствует и все силы, действующие на звенья механизма, расположены в одной плоскости.
При отсутствии сил трения сила взаимодействия между 2-мя звеньями всегда направлена по нормали к поверхности их касания. В поступательной паре все элементарные силы взаимодействия и их равнодействующая будут расположены перпендикулярно направляющей поступательной пары.
Наиболее удобным методом силового расчета механизма является метод планов сил.
При силовом расчете механизм расчленяется на отдельные группы, при этом расчет начинается с группы, присоединенной последней в процессе образования механизма, а заканчивается расчетом ведущего звена начального механизма. Если плоский механизм имеет одну степень свободы, то начальный механизм состоит из 2-х звеньев: неподвижного (стойка) и начального звена. Эти звенья образуют либо вращательную кинематическую пару (кривошип-стойка), либо поступательную пару (ползун-направляющие). Звено, к которому приложена уравновешивающая сила Fу, будем считать при силовом расчете начальным звеном механизма. Реакция в начальном вращательном механизме зависит от способа передачи энергии начальному звену источником энергии. Если кривошипный вал приводится во вращение парой, например, непосредственно от электродвигателя, то в этом случае к валу приложен уравновешивающий момент.: Му=R3,2·h  Нм Нм и реакция в опоре О вала (звено 1) будет равна действию звена 3 на звено 2 (кривошип) (рис.7). и реакция в опоре О вала (звено 1) будет равна действию звена 3 на звено 2 (кривошип) (рис.7).
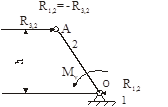
Рис.7
Рассмотрим на примере двухповодковой группы шатун АВ-ползун В кривошипно-ползунного механизма ДВС способ силового расчета, основанный на методе планов сил (рис.8).
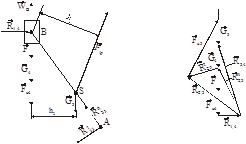
Рис.8
На звенья этой группы действуют силы:
F – давление газов на поршень;
G3, G4 – силы тяжести;
Fu3, Fu4 – результирующие силы инерции;
R1,4 – давление направляющих на ползун;
R2,3 – давление кривошипа на шатун.
Условие равновесия группы:

Раскладываем давление R2,3 на составляющие:
 , действующие: , действующие:
 - вдоль оси звена 3 (шатун); - вдоль оси звена 3 (шатун);
 - перпендикулярно к оси звена 3. - перпендикулярно к оси звена 3.
Составляющую  определим из уравнения моментов всех сил, действующих на шатун АВ, относительно точки В: определим из уравнения моментов всех сил, действующих на шатун АВ, относительно точки В:
 или или

откуда:
Строим план сил по уравнению равновесия группы.
Проводим вектор  из начала вектора из начала вектора  . Через его начало проводим линию действия . Через его начало проводим линию действия  до пересечения с линией действия R1,4 , до пересечения с линией действия R1,4 ,
проведенной из конца вектора   . R2,3 – давление в кинематической паре А. . R2,3 – давление в кинематической паре А.
Планы сил строим в масштабе μр=500 Н/мм, 200 Н/мм, 100 Н/мм.
Давление R3,4 в паре шатун-ползун определяем из условия равновесия ползуна:  . .
Точкой приложения  и и  будет точка В, т.к. силы F, Fu4 и G4, действующие на ползун, проходят через эту точку. будет точка В, т.к. силы F, Fu4 и G4, действующие на ползун, проходят через эту точку.
Давление R1,2 в паре О-2 «Кривошип-стойка» и уравновешивающий момент Му определяем из условия равновесия кривошипа ОА (вес кривошипа и противовеса не учитываем, т.к. в большинстве положений он незначителен по сравнению с величиной R3,2).
μр – масштаб плана сил;
h3 – плечо силы R3,2 относительно точки О на схеме механизма;
μе – масштаб длин кинематической схемы.
5. Теорема Н.Е. Жуковского
Если какой-либо механизм с одной степенью свободы под действием сил F1, F2, F3 …, приложенных в точках D, T, N…, находятся в равновесии, то в равновесии находится повернутый на 900 план скоростей, рассматриваемый как рычаг, вращающийся вокруг полюса Р и нагруженный теми же силами F1, F2, F3 …, приложенными в точках d, e, n….
Построение повернутого плана скоростей можно производить при помощи любого масштабного коэффициента μv, т.к. условие равновесия не зависит от величины плана.
Определим уравновешивающий момент Му для кривошипно-ползунного механизма (рис.9) и сравним его с величиной, полученной силовым расчетом механизма.
Для этого на план скоростей в изображающие точки переносим все заданные силы, включая силы инерции и уравновешивающую силу, повернутые на 900 в одном направлении.
Из условия равновесия плана скоростей как «жесткого рычага» определяем уравновешивающую силу Fу; её прикладываем в точке «а», считая её как бы приложенной в точке А кривошипа, и направляем её перпендикулярно линии кривошипа ОА.
Рис.9
Следовательно,
 ; ;
Отсюда:
 ; ;
Уравновешивающий момент:
 или или  ; ;
Величина расхождения:
не должна превышать ± 5%.
механизм сопротивление инерция кинетостатический
Литература
1.Артоболевский И.И. Теория механизмов и машин М, 1975, с.268-271.
2.Кореняко А.С. и др. Курсовое проектирование по теории механизмов и машин. Киев,1970, с.141-161.
|