ОБҐРУНТУВАННЯ ВИБОРУ СИГНАЛУ ДЛЯ СИСТЕМ ТРОПОСФЕРНОГО ЗВ’ЯЗКУ З КОДОВИМ РОЗПОДІЛОМ КАНАЛІВ
1. Основні принципи побудови широкосмугових сигналів
Системи зв’язку з шумоподібними сигналами (ШПС) відомі близько чверті століття. За цей час їхні переваги стали очевидними, а їх недоліки усунені. В теперішній час системи зв’язку з ШПС отримують все більше розповсюдження. Процес розширення областей використання систем зв’язку з ШПС у найближчому майбутньому буде розширюватися. Основи теорії систем зв’язку з ШПС закладені в працях В.А.Котельникова, Шеннона, а основи кодового розподілу каналів в роботах Д.В.Агеєва [2]. Переваги зв’язку такі: по-перше, вони мають високу перешкодозахищеність в умовах потужних перешкод; по-друге, забезпечують кодову адресацію великої кількості абонентів, і їх кодовий розподіл при роботі в загальній смузі частот; по-третє, вони забезпечують прийом інформації з вискою достовірністю. Всі ці якості системи ШПС були відомі давно, але оскільки потужні передавачі повинні бути відносно невеликі, а елементна база не дозволяла реалізувати пристрої формування та обробки в прийнятних габаритах, то довгий час системи зв’язку з ШПС широкого розвитку не мали.
В теперішній момент ситуація суттєво змінилася. Потужність перешкод на вході приймача може на декілька порядків перевищувати потужність корисного сигналу. Для забезпечення високої перешкодозахищеності при подібних перешкодах необхідно використовувати ШПС з дуже великими базами. Слід відмітити, що основи теорії ШПС з великими базами сформувалися лише останнім часом. В свою чергу реалізація пристроїв формування та обробки таких сигналів стає можливим завдяки бурхливому розвитку великих та надвеликих інтегральних мікросхем, спеціалізованих мікропроцесорів, пристроїв з поверхнево-акустичними хвилями, пристроїв із зарядним зв’язком. Усі ці причини і визначили новий період розвитку систем зв’язку з ШПС. Поміж застосуванням в умовах впливу потужних перешкод системи зв’язку з ШПС починають успішно конкурувати з системами зв’язку з частотною модуляцією та частотним роподілом каналів.
Широкосмугові сигнали ще мають назву складних. Складним сигналом називають такий сигнал, добуток тривалості якого на ширину спектру значно більше одиниці.
B
=TF
; B
>>1, ( 1)
де В
– база сигналу;
Т
– тривалість сигналу;
F
– ширина спектру сигнала.
На застосуванні складних сигналів базується технологія, яка дозволяє використовувати вже зайняті частотні діапазони при дотриманні умов повної електромагнітної сумісності [3]. В найближчому майбутньому стратегія розвитку систем багатоканального зв’язку буде заключатися в покращенні показників спектральної ефективності складних сигналів, на застосуванні яких засновано функціонування систем із кодовим розподілом каналів.
Основна ідея технології складних сигналів базується на перетворенні вузькосмугових сигналів з шириною спектру Δ
f
в широкосмуговий із шириною спектру Δ
F
при постійній енергії сигналів Е
, як зображено на рис. 1.
Рис. 1. Перетворення вузькосмугового сигналу в широкосмуговий
Нехай потрібно передати повідомлення, спектр якого має ширину Δ
f
, а спектральна щільність енергії може бути оцінена відношенням Е/
f
. При використанні широкосмугової передачі в ефір випромінюється сигнал з навмисно розширеною смугою F
, так що спекральна щільність енергії відносно сигналу зменшується в F
/
f
разів і складає Е/
F
. База ж сигналу, яка дорівнює добутку ширини спектру на тривалість, збільшується при цьому в F
/
f
разів.
Із рис. 1 видно, що отриманий складний (шумоподібний) сигнал по відношенню до вихідного простого сигналу являє собою шум з приблизно постійною в межах інтервалу Δ
f
спектральною щільністю енергії. Зрозуміло, що чим більше «розтягнута» смуга Δ
F
складного сигналу при постійній енергії Е
, тим менша спектральна щільність енергії сигналу. В результаті отримана широкосмугова система може чинити на працюючу в цьому ж діапазоні вузькосмугову систему, як завгодно малий вплив.
Відомо декілька способів організації систем із складними сигналами, але в кожному випадку повинно бути виконано ряд умов:
- розширення бази сигналу за допомогою коду;
- кодова синхронізація передавальної та приймальної сторін;
- рівень взаємних перешкод в системі не вище граничного рівня;
- застосування оптимальних кодових послідовностей з метою покращення характеристик системи.
Існують два основних способи розширення бази сигналів [3]:
1) швидка стрибкоподібна зміна несучої частоти;
2) пряме розширення спектру частот.
При стрибкоподібній зміні частоти несучого коливання кожен символ повідомлення передається за допомогою набору дискретних частот.
При використанні другого способу розширення бази, вихідний вузькосмуговий сигнал перемножують на псевдовипадкову послідовність (ПВП), яка складається із N
елементів тривалістю δ кожний, ПВП має період повторення Т=
N
δ
. В цьому випадку база сигналу дорівнює кількості N
елементів в періоді ПВП. Алгоритми генерування ПВП відомі та табульовані. На практиці часто використовуються бінарні ПВП, тобто послідовності на основі двійкового алфавіту, які умовно можна позначити +1 і -1. Такі послідовності мають ряд важливих властивостей:
- в ПВП кількість елементів +1 і -1 приблизно однакові;
- відрізок ПСП довжиною r
, який складається з +1 або -1 зустрічається в середньому 2/rN
разів в послідовності з періодом повторення N
;
- автокореляційні функції (АКФ) та взаємнокореляційні функції (ВКФ) таких послідовностей забезпечують оптимальну кореляційну обробку при прийомі.
Принцип розширення бази сигналу по методу прямого розширення спектру частот пояснює рис. 2.
Рис. 2. Принцип методу прямого розширення спектру частот
При цьому слід враховувати, що в цифрових системах зв’язку, які передають інформацію у вигляді двійкових символів, тривалість ШСС та швидкість передачі інформації V
зв’язані співвідношенням Т=1/
V
, через це база ШСС буде рівна

Також застосування ШПС в системах зв’язку дозволяє боротися з багатопроменевим розповсюдженням радіохвиль. Багатопроменевість виникає в тому випадку, якщо радіохвилі приходять в точку прийому, відбившись від різних перешкод на шляху розповсюдження (шари іоносфери, тропосфери, будівлі, пагорби і т.д.).
Через різницю шляху ці радіохвилі приходять з різним запізненням. В результаті, якщо сигнали прийшли по різним шляхам, то вони перекриваються в часі і між ними виникає інтерференція, яка в свою чергу викликає глибокі завмирання результуючого сигналу [3]. Звичайно для компенсації завмирань передбачено підвищення потужності на 20 дБ. Інакше відбувається при застосуванні ШСС, оскільки при обробці ШПС узгодженим фільтром відбувається стиснення ШПС в часі, що показано на рис. 2. На рис. 2 показано ШПС з частотною модуляцією тривалістю Т
, а також напругу на виході узгодженого фільтра – відгук на ШПС. Цей відгук називають АКФ. Як видно з даного рисунка, тривалість АКФ – 2Т
і в ній можна виділити дві різко різних структури. В центрі АКФ різкий викид у вигляді вузького імпульсу, який називається центральним піком. Його амплітуда дорівнює V
, а тривалість τ≈1/
F
.
На рис. 3 зображено відгук узгодженого фільтра на декілька ШПС, які прийшли різними шляхами. Якщо затримка між променями Δ
t
, більше тривалості τ
, то промені розділяються і центральні піки можна розділити один від другого, а потім об’єднати, усунувши затримку між ними. Таким чином умова Δ
t
>τ
, забезпечує розділення променів. Оскільки τ
і F
зв’язані співвідношенням τ=1/
F
, то умова розділення променів записується наступним чином: . .
Шумоподібні сигнали забезпечують добру електромагнітну сумісність (ЕМС) з вузькосмуговими сигналами. На рис. 4 зображено спектр ШПС із шириною спектру F
та вузькосмуговою системою із шириною спектру F
В
.
Рис. Автокореляційні функції двох сигналів
Рис. 4. Спектри вузькосмугового та ШПС сигналів
Відповідно для ШПС спектральна щільність потужності буде [2]:
 . ( 2) . ( 2)
Для вузькосмугового сигналу:
 . ( 3) . ( 3)
Перешкодозахищеність систем зв’язку з ШПС визначається фундаментальним співвідношенням:
 . ( 4) . ( 4)
Вузькосмугова система має постійний спектр, який можна подавити використавши режекторний фільтр, налаштований на частоту вузькополосної системи. Таким чином вплив такої системи на систему зв’язку з ШПС буде незначний. В свою чергу, широкосмугова система, також слабо впливає на вузькосмугову систему. Потужність ШСС, який приходить на вхід приймача:
 . ( 5) . ( 5)
Через це співвідношення сигнал/шум на вході приймача буде визначатися виразом:
. ( 6)
Тому чим більше F
/F
В
, тим краща фільтрація ШПС вузькосмуговою системою зв’язку. Відповідно, чим більша база ШПС, тим краща ЕМС цих систем. Таким чином, системи ШПС володіють гарною ЕМС з системами радіозв’язку, радіомовлення та телебачення.
Із розглянутих основних властивостей ШПС слідує, що застосування ШПС в системах зв’язку забезпечує перешкодозахищеність відносно сильних перешкод, скритність адресність, працездатність в загальній смузі частот, боротьбу з багатопроменевістю, гарну ЕМС з багатьма радіотехнічними системами. Ці переваги отримуємо за рахунок використання ШПС з великими базами, що в свою чергу призводить до різкого ускладнення пристроїв формування та обробки, збільшенню їх маси, об’єму, споживаної потужності [2]. Але ці проблеми можна подолати при сучасній елементній базі, і через це ШПС зараз знаходять застосування в різних системах зв’язку.
2. Системи тропосферного зв’язку з кодовим розподілом каналів
З розвитком асинхронно-адресних систем зв’язку використання ШПС в системах масового тропосферного зв’язку стало можливим [3]. Основу для цього складає кодове розподілення абонентів за рахунок ШПС, які вдрізняються по формі. При великих базах можна побудувати велику кількість ШПС. Наприклад, нехай ШПС являє собою фазоманіпульований сигнал, який складється з радіоімпульсів, початкові фази яких дорівнюють 0 або π
, а число їх рівне В
(база сигналу). Можна побудувати множину сигналів (так званий повний код), число сигналів в якому рівне 2В
, а сигнали відрізняються між собою хоч одним імпульсом. Якщо В
=100, то маємо 2100
≈1030
різних сигналів. З такої кількості можна відібрати систему сигналів так, щоб кожному абоненту в системі зв’язку присвоїти свій власний сигнал. При цьому усі абоненти можуть працювати в загальній смузі частот, а розподіл їх можливий за рахунок різниці ШПС по формі. Такий розподіл абонентів називається кодовим. При цьому ШПС по суті є адресою абонента і в цьому випадку принципово немає необхідності часової синхронізації абонентів. Через це подібні системи зв’язку отримали назву асинхронно-адресних систем зв’язку. Їх робота базується на застосуванні ШПС і кодовому розподілі абонентів. В ААСЗ всі абоненти працюють в загальній смузі перешкодю через це при передачі інформації ШПС різні абоненти перекриваються по часу і по частоті і створюють взаємні перешкоди. Але при використанні ШПС з великими базами можливо звести рівень взаємних перешкод до необхідного, щоб забезпечити необхідну якість прийому інформації. Якщо припустити, що на вході одного з приймачів системи зв’язку діють L
заважаючих ШПС з однаковими потужностями, то відношення сигнал/перешкода на виході приймача буде:
 . ( 7) . ( 7)
Таким чином, збільшуючи базу ШПС, завжди можна досягти необхідної якості прийому інформації. Залежність бази сигналу від кількості абонентів при h
2
=
const
показано на рис. 5.
Рис. 5. Залежність бази сигналу від кількості абонентів
Через це в теперішній час надзвичайно актуальною залишається проблема систем ШПС. Системою сигналів називається множина сигналів, що визначаються одним алгоритмом побудови. Якщо число сигналів в системі рівне L
, то L
– називають об’ємом системи сигналів. Прийнято порівнювати об’єм системи сигналів L
з базою ШПС В
. Розрізняють:
- малі системи сигналів з L
<<В
;
- нормальні (ортогональні) системи з L
≈В
;
- великі системи сигналів з L
>>В
.
Більшість відомих систем сигналів являються малими чи нормальними [3]. Для сучасних систем зв’язку необхідно мати системи ШПС, об’єм яких експоненціально залежить від бази, тобто
 , ( 7) , ( 7)
де с
і γ
– деякі константи.
Якщо такий закон реалізувати не можливо (таких систем на сьогодні немає), то необхідно реалізовувати великі системи, об’єм яких збільшується за степеневим законом:
 , ( 8) , ( 8)
де с
і n
– постійні величини, при чому n
>1.
Сигнали, що входять в систему повинні забезпечувати мінімально можливий рівень взаємних перешкод, який в основному визначається допустимим рівнем піків ВКФ.
 , ( 10) , ( 10)
де α
– пікфактор ВКФ, в загальному випадку залежить від В
.
Чим менше α
, тим кращі взаємокореляційні властивості. Через це зараз існує наступна не вирішена проблема – розробка алгоритмів побудови великих систем ФМ ШПС з високими кореляційними властивостями. Алгоритми побудови систем ФМ повинні бути детермінованими, оскільки сигнали повинні бути відомі в точці прийому.
3.
Вибір сигналу для систем тропосферного зв’язку з кодовим розподілом каналів
Відома різноманітна кількість ШПС. Загальної термінології не існує, але ШПС можна розбити на частотно-модульовані (ЧМ) сигнали, багато-частотні (БЧ) сигнали, фазоманіпульовані (ФМ), сигнали з кодово-частотною модуляцією (КФМ), дискретні складні частотні сигнали (ДСЧ), складні сигнали з кодово-частотною модуляцією (СКЧМ) [3].
Іноді ФМ сигнали називають просто ШПС ДЧ сигнали зі «стрибаючою» частотою (ППРЧ).
Рис. 6,а. ЧМ сигнал та його частотно-часова площина
ЧМ сигнали є безперервними сигналами, частота яких змінюється по заданому закону. На рис. 6,а показано ЧМ сигнал, частота якого змінюється по V-подібному закону від f
0
-F
/2 до f
0
+F
/2, де f
0
– несуча частота сигналу, F
– ширина спектру, яка дорівнює девіації частоти F
=Δ
f
, тривалість сигналу дорівнює Т
. На рис. 6,а зображено частотно-часову площину, на якій штриховкою, приблизно зображено розподіл енергії ЧМ сигналу по частоті і по часу. База ЧМ сигналу по визначенню: B
=FT
=Δ
fT
.
          
 ЧМ сигнали знайшли широке застосування в радіолокаційних системах, оскільки для конкретного ЧМ сигналу можна синтезувати узгоджений фільтр на приладах з поверхнево-акустичними хвилями. В системах зв’язку необхідно мати множину сигналів. При цьому необхідність швидкої зміни сигналів перемикань апаратури формування і обробки призводить до того, що закони зміни частоти стають дискретними [3]. ЧМ сигнали знайшли широке застосування в радіолокаційних системах, оскільки для конкретного ЧМ сигналу можна синтезувати узгоджений фільтр на приладах з поверхнево-акустичними хвилями. В системах зв’язку необхідно мати множину сигналів. При цьому необхідність швидкої зміни сигналів перемикань апаратури формування і обробки призводить до того, що закони зміни частоти стають дискретними [3].
Рис. 6,б. БЧ сигнал та його частотно-часова площина
Багаточастотні сигнали являють собою суму N
гармонік U
1
(
t
)…
U
n
(
t
)
, амплітуди та фази яких визначаються у відповідності із законом формування сигналів. На частотно-часовій площині (рис. 6,б) штриховкою виділено розподіл енергії одного елемента БЧ сигналу на частоті fk
. Всі елементи повністю перекривають виділений прямокутник зі сторонами FT
. База сигналу В
дорівнює площі прямокутника. Ширина спектру елементу  . Через це база БЧ сигналу буде: . Через це база БЧ сигналу буде:
 . ( 11) . ( 11)
Тобто співпадає з кількістю гармонік. БЧ сигнали є безперервними і для їх формування та обробки складно пристосувати цифрову техніку. Крім цього БЧ сигнали мають наступні недоліки:
- поганий пікфактор:
 ; ( 12) ; ( 12)
- для отримання великої бази необхідно мати велику кількість частотних каналів.
Через це БЧ сигнали не мають перспективи розвитку.
Дискретно-частотні сигнали являють собою послідовність радіоімпульсів, несучі частоти якого змінюються по заданому закону. Нехай кількість імпульсів в ДЧ сигналі рівне М
, тривалість імпульсу рівна  , його ширина спектру , його ширина спектру  . На частотно-часовій площині (рис. 7) штриховкою виділені квадрати, в яких розподілена енергія імпульсів ДЧ сигналу. База імпульсу ДЧ сигналу становить F
0
Т
0
=1. . На частотно-часовій площині (рис. 7) штриховкою виділені квадрати, в яких розподілена енергія імпульсів ДЧ сигналу. База імпульсу ДЧ сигналу становить F
0
Т
0
=1.
Із цього виразу випливає, що основною перевагою ДЧ сигналів для отримання необхідної бази В
є число каналів  , тобто значно менша ніж для БЧ сигналів. Саме ця перевага і обумовила увагу до цих сигналів і їх використання в системах зв’язку [3]. , тобто значно менша ніж для БЧ сигналів. Саме ця перевага і обумовила увагу до цих сигналів і їх використання в системах зв’язку [3].
Разом з цим для великих баз В
=104
…106
використовувати лише ДЧ сигнали не доцільно, так як кількість частотних каналів М
=102
…103
, що є надзвичайно великою.
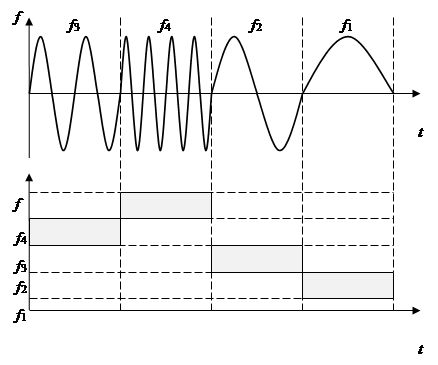
Рис. 7. Частотно-часова площина ДЧ сигналу
Дискретними складними частотними сигналами є ДЧ сигнали, у яких кожен імпульс замінено шумоподібним сигналом. На рис. 8 зображено відеочастотний ФМ сигнал, окремі частини якого передаються на різних несучих частотах.
Номери частот вказані над ФМ сигналом. На рис. 8 зображено частотно-часову площину, на якій штриховкою виділено розподіл енергії ДСЧ сигналу.
База ДСЧ сигналу:
 . ( 15) . ( 15)
 – число імпульсів ФМ сигналу в одному частотному елементі ДСЧ сигналу. Кількість імпульсів повного ФМ сигналу дорівнює – число імпульсів ФМ сигналу в одному частотному елементі ДСЧ сигналу. Кількість імпульсів повного ФМ сигналу дорівнює  . Зображений ДСЧ сигнал містить в якості елементів ФМ сигнали. Через це такий сигнал можна назвати ДСЧ-ФМ сигналом. Якщо база ДСЧ сигналу . Зображений ДСЧ сигнал містить в якості елементів ФМ сигнали. Через це такий сигнал можна назвати ДСЧ-ФМ сигналом. Якщо база ДСЧ сигналу  , то база всього сигналу , то база всього сигналу  . .
                                 
        
   Такий сигнал скорочено можна позначити ДСЧ-ЧМ. Число частотних каналів в ДСЧ-ЧМ дорівнює Такий сигнал скорочено можна позначити ДСЧ-ЧМ. Число частотних каналів в ДСЧ-ЧМ дорівнює  . Якщо ДЧ сигнал і ДСЧ-ЧМ мають рівні бази, то вони мають і однакове число частотних каналів. Через це особливих переваг ДСЧ-ЧМ сигнал перед ЧМ сигналом не має [3]. Але принципи побудови ДСЧ-ЧМ сигналу можуть виявитися корисними при побудові великих систем ДЧ сигналів. . Якщо ДЧ сигнал і ДСЧ-ЧМ мають рівні бази, то вони мають і однакове число частотних каналів. Через це особливих переваг ДСЧ-ЧМ сигнал перед ЧМ сигналом не має [3]. Але принципи побудови ДСЧ-ЧМ сигналу можуть виявитися корисними при побудові великих систем ДЧ сигналів.Фазоманіпульовані сигнали являють собою послвдовність радіоімпульсів, фази яких змінюються по заданому закону первинного сигналу. Звичайно фаза приймає два значення (0 чи π
). При цьому радіочастотному ФМ сигналу відповідає відео-ФМ сигнал (рис. 9), який складається із позитивних і негативних імпульсів. Якщо число імпульсів N
,
то тривалість одного імпульсу рівна  , а ширина його спектру рівна приблизно ширині спектру сигналу , а ширина його спектру рівна приблизно ширині спектру сигналу  . .
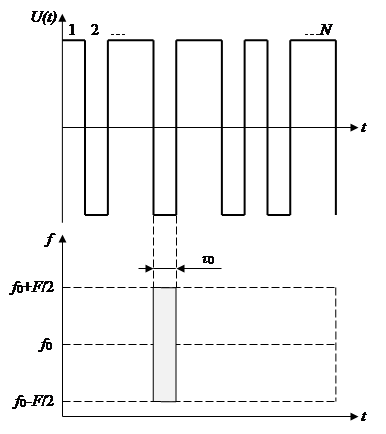
Рис. 9. Частотно-часова площина ФМ сигналу
На частотно-часовій площині (рис. 9) штриховкою виділено розподіл енергії одного елемента (імпульсу) ФМ сигналу. Всі елементи перекривають виділений квадрат зі сторонами F
і Т
. база ФМ сигналу:
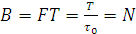 . ( 16) . ( 16)
Тобто база дорівнює кількості імпульсів в сигналі. Можливість застосування ФМ сигналів в якості ШСС з базами В
=104
…106
обмежена в основному апаратурою обробки. При використанні узгоджених фільтрів у вигляді пристроїв на ПАХ, можливий оптимальний прийом ФМ сигналів з максимальними базами В
=1000…2000. ФМ сигнали, котрі обробляюються такими фільтрами, мають широкі спектри (близько 10…20 МГц) і відповідно короткої тривалості (10…50 мкс). Обробка ФМ сигналів за допомогою відеочастотних ліній затримки при переносі спектрів сигналів в область відео частот, дозволяє отримувати бази В
=100 при F
≈1 МГц, Т
≈100 мкс.
Перспективними є фільтри виконані на пристроях зі зворотнім зв’язком. За допомогою узгоджених фільтрів на ПЗЗ можна обробляти сигнали.
ФМ сигнали з базами 102
…103
при тривалості сигналів 10-4
…10-1
с цифровий корелятор на ПЗЗ здатний обробляти сигнали з базами 9·104
. Слід відмітити, що ФМ сигнали з великими базами доцільно обробляти за допомогою кореляторів на великих інтегральних схемах чи ПЗЗ. При цьому В
=4·104
являється граничною. Але при використання кореляторів необхідно в першу чергу вирішити питання про прискорене входження в синхронізм [3].
Так як ФМ сигнали дозволяють широко використовувати цифрову техніку та методи формування та обробки, можна реалізувати сигнали з відносно великим базами, через це ФМ є одним з перспективних видів ШСС.
Тому розроблена схема приймача обробляє саме ФМ сигнали.
Висновки
1. Використання фазокодоманіпульваних сигналів у системах широкосмугового зв’язку забезпечує ряд важливих переваг перед системами існуючого вузькосмугового зв’язку, а саме:
а) вища перешкодозахищеність широкосмугових систем зв’язку;
б) підвищена прихованість таких систем зв’язку;
в) раціональне використання частот за рахунок кодового розділення абонентів;
г) використання ШСС в системах зв’язку дає можливість ефективно боротися з багатопроменевістю розповсюдження радіохвиль;
д) шумоподібні сигнали забезпечують кращу електромагнітну сумісність широкосмугових та вузькосмугових систем радіозв’язку.
2. Умовами вибору фазокодоманіпульованого сигналу стали такі його переваги над іншими видами широкосмугових сигналів:
а) фазокодоманіпульовані сигнали дозволяють широко використовувати цифрові методи та техніку формування та обробки, що є досить актуальним на сьогодення;
б) порівняно проста реалізація пристроїв формування і обробки на елементах дискретної мікроелектронної техніки;
в) кращі кореляційнй властивості таких сигналів в частотно-часовій площині.
Таким чином обраний сигнал повністю задовільняє вимогам нової тропосферної станції.
|