|  МПС РФ МПС РФ
Уральский государственный университет путей сообщения
Кафедра “Вагоны”
Курсовой проект
По дисциплине “Строительная механика и динамика вагонов”
Екатеринбург
2001
Содержание
1 Цель работы и решаемые задачи
2 Объект исследования
3 Динамическая система и метод расчета
3.1 Допущения по расчетной модели
3.2 Источник возмущений
3.3 Метод расчета и уравнения колебаний системы
3.4 Структура физико-математической модели динамической системы и ее топологическая модель
4 Инерционно-топологическая модель вагона
4.1 Характеристика инерционно-топологической подсистемы
4.2 Характеристики инерции
4.3 Математическая инерционная модель
5 Виброзащитная модель динамической системы
5.1 Характеристики рессорного подвешивания двухосной тележки грузового вагона
5.2 Нагруженность системы силами упругости и реакциями сил упругости
5.3 Математическая модель виброзащитной системы вагона
6 Внешняя нагруженность динамической системы
6.1 Физическая модель нагруженности вагона
6.2 Математическая модель внешних возмущающих нагрузок
6.3 Математическая модель динамики вагона на рессорах
7 Свободные колебания вагона на рессорах
7.1 Уравнения свободных колебаний вагона
7.2 Определение частот свободных колебаний
7.3 Формы колебаний вагона
8 Вынужденные колебания вагона на рессорах
8.1 Резонансные колебания кузова вагона
8.2 Определение параметров гасителей колебаний
Литература
Целью работы является:
- изучение метода расчета динамической системы;
- исследование колебаний вагона на рессорах.
Решаемые задачи:
- определение характеристик расчетных моделей подсистем;
- изучение свободных и вынужденных колебаний;
- определение параметров гасителей рессорного подвешивания вагона.
Объектом исследования является модель крытого вагона 11-066 с одинарным рессорным подвешиванием.
Таблица 2.1
Характеристика задания
|
№ вар
|
Тип вагона и его модель
|
Степень загрузки
|
Число пружин в рессорном комплекте
|
Неровность (П,К)
|
| по массе
|
по объему
|
амплитуда
 , мм , мм
|
длина волны  , ,
м
|
| 1
|
11-066
|
1
|
1
|
7
|
8
|
12,5
|
Таблица 2.2
Параметры модели кузова
и груза
| Название элемента
|
Обозначение
параметра
|
Значение
|
| Внутренние размеры кузова, мм:
– длина;
– ширина;
– высота по боковой стене
|
L
B
H
|
13844
2760
2791
|
| База модели, мм
|
2l
|
10000
|
| Размеры элементов кузова, мм:
– толщина торцевой стены;
– толщина боковой стены;
– высота рамы.
|
aT
aБ
hp
|
20
20
360
|
| Поперечное расстояние между осями рессорного подвешивания, мм:
|
2b
|
2036
|
| Массы вагона (тары), кг;
|
MВ
|
22000
|
| Масса груза, кг;
|
MГ
|
68000
|
| Масса тележки, кг;
|
MТ
|
4800
|
| Масса надрессорной балки, кг;
|
MНБ
|
600
|
При выборе динамической расчетной модели принимаем следующие допущения:
· динамическую систему представляем в виде системы твердых тел;
· полагаем, что в рессорном подвешивании отсутствуют диссипативные силы сухого и вязкого трения, система вследствие этого будет являться консервативной;
· грузы рассматриваем как твердые тела с жестким присоединением к кузову вагона;
· рессорные комплекты тележек имеют линейную силовую характеристику;
· путь считаем абсолютно жестким.
В качестве источника возмущения принимаем гармоническую неровность первого вида:
 ,(3.1) ,(3.1)
где  - частота изменения гармонической неровности: - частота изменения гармонической неровности:
 ,(3.2) ,(3.2)
 - скорость движения вагона. - скорость движения вагона.
Физическая модель метода расчета
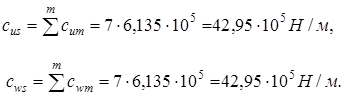
Для расчета системы используем метод реактивных усилий. Колебания кузова в пространстве определяем по движению центра масс кузова  : тремя линейными : тремя линейными  и тремя угловыми и тремя угловыми  его перемещениями по направлению координатных осей кузова его перемещениями по направлению координатных осей кузова  (рисунок 4.1). (рисунок 4.1).
Движение всех других частей кузова находим по колебаниям  центра масс кузова и координатам этих частей, центра масс кузова и координатам этих частей,  . .
Узел  , движение которого будем изучать, условимся называть центрально-координатным узлом. , движение которого будем изучать, условимся называть центрально-координатным узлом.
Центрально-координатный узел полагаем имеет внутренние линейные и угловые связи по направлению координатных осей  . Считаем, что все усилия, действующие на рассматриваемое тело, через внутренние элементы-вставки передаются в связи центрально-координатного узла и здесь взаимно уравновешиваются на основании принципа Лангранжа-Деламбера. . Считаем, что все усилия, действующие на рассматриваемое тело, через внутренние элементы-вставки передаются в связи центрально-координатного узла и здесь взаимно уравновешиваются на основании принципа Лангранжа-Деламбера.
Усилия, которые подходят к узлу, являются активными. Они вызывают в связях реакции:  - сил инерции, - сил инерции,  - сил упругости, - сил упругости,  - сил вязкого трения, - сил вязкого трения,  - возмущающие силы и другие, равные по величине активным силам и противоположно по направленные, где - возмущающие силы и другие, равные по величине активным силам и противоположно по направленные, где  - номер реакции и номер перемещения. - номер реакции и номер перемещения.
По видам перемещений кузова колебаниям присвоены названия:
 - колебание подергивания (линейное по оси - колебание подергивания (линейное по оси  ); );
 - колебание подпрыгивания (линейное по оси - колебание подпрыгивания (линейное по оси  ); );
 - колебание бокового относа (линейное по оси - колебание бокового относа (линейное по оси  ); );
 - колебание бокового поворота (угловое - колебание бокового поворота (угловое  вокруг оси ); вокруг оси );
 - колебание виляния (угловое - колебание виляния (угловое  вокруг оси ); вокруг оси );
 - колебание галопирования (угловые - колебание галопирования (угловые  вокруг оси ). вокруг оси ).
Уравнения колебаний вагона
Уравнения колебаний вагона в общем случае запишутся из уравнений равновесия реакций в центрально-координатных связях кузова:
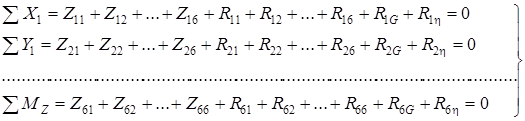 (3.3) (3.3)
Для сил инерции и сил упругости с линейными характеристиками значения реакций  будем записывать через коэффициенты от единичных воздействий: будем записывать через коэффициенты от единичных воздействий:
 (3.4) (3.4)
где  - коэффициенты реакций сил инерции и упругости от единичных возмущений: - коэффициенты реакций сил инерции и упругости от единичных возмущений:  . .
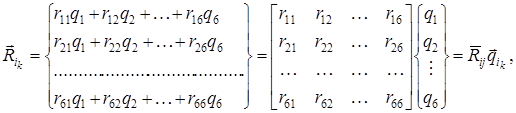
Уравнения колебаний (3.3) в этом случае можно представить в развернутой записи как систему уравнений вида:
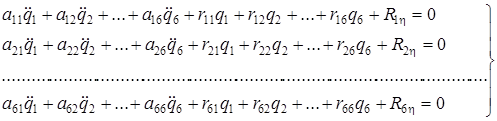 (3.5) (3.5)
По видам нагрузок и подконструкций расчетную модель вагона представим в виде отдельных подсистем – блок-моделей.
В общем случае основными подсистемами расчетной модели являются:
1. Топологическая модель;
2. Инерционная модель;
3. Виброзащитная модель;
4. Диссипативная модель вязкого трения;
5. Диссипативная модель сухого трения;
6. Модель возмущающих нагрузок;
7. Гравитационная модель сил тяжести.
Частную топологическую модель представляем в виде невесомых подконструкций, с соответствующими размерами и связями между ними, массами, силовыми устройствами, центрально-координатными узлами.
Топологическая модель подразделяется на отдельные подсистемы, работающие с заданным видом нагрузок блок-моделей.
Топологическими характеристиками динамической системы являются:
· общие размеры динамической системы;
· геометрические размеры отдельных элементов, узлов, частей, единиц подвижного состава;
· положение центров масс и координатных осей подконструкций.
В качестве частей конструкции в физических моделях выступают: кузов вагона, рамы тележек, колесные пары, рессорные комплекты, подрессоренные грузы и т.п.
В расчетных моделях узлы подконструкций в зависимости от вида их нагрузок будем в дальнейшем называть инерционными, виброзащитными, диссипативными и так далее.
Для определения характеристик инерции разбиваем кузов на узлы инерции: раму, торцевые и боковые стены, крышу, надрессорные балки, груз и указываем размеры частей на схеме (рис 4.1)
Считаем в инерционных элементах (частях кузова) массы распределенными равномерно по их объемам.
Заменяем распределенные массы элементов на сосредоточенные и располагаем их в центрах масс элементов.
Для определения координат центров масс элементов и кузова принимаем начальную систему координат  . Ось . Ось  направим по оси автосцепки, другие - направим по оси автосцепки, другие -  - по осям симметрии кузова (рисунок 4.1). - по осям симметрии кузова (рисунок 4.1).
Координаты центров тяжести элементов в системе координат  заносим в табл. 4.1. заносим в табл. 4.1.
Таблица 4.1
Характеристики узлов
| M, кг
|
l, мм
|
b, мм
|
h, мм
|
x, мм
|
y, мм
|
z, мм
|
| Рама
|
7000
|
13870
|
3200
|
360
|
0
|
-1367
|
0
|
| Тор. стена
|
350
|
20
|
2760
|
2791
|
6925
|
118,6
|
0
|
| Бок. стена
|
1559
|
13870
|
20
|
2791
|
0
|
118,6
|
1590
|
| Крыша
|
1603
|
13870
|
3200
|
587
|
0
|
1777
|
0
|
| Груз
|
68000
|
13844
|
2760
|
2791
|
0
|
118,6
|
0
|
| Над. Бал.
|
600
|
325
|
2590
|
325
|
5000
|
-1799
|
0
|
| Сумма(М)
|
78512
|
Положение центра масс кузова и его главных координатных осей
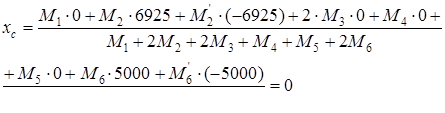
Положение центра масс кузова определяется координатами  . .
Из условия равенства суммы моментов инерции элементов по оси  и общего для кузова от возмущений и общего для кузова от возмущений  , выражения координат равны: , выражения координат равны:
 ,(4.1) ,(4.1)
где  – массы кузова, участвующие в колебаниях по направлению осей – массы кузова, участвующие в колебаниях по направлению осей  : :
 ; ;
 – координаты центров масс элементов и груза в начальной системе координат – координаты центров масс элементов и груза в начальной системе координат  . .
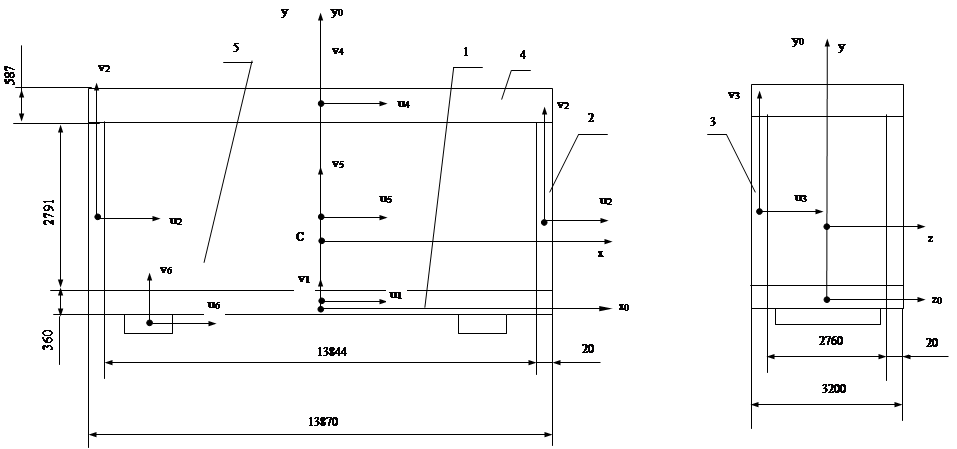
Рисунок 4.1- Топологическая модель кузова вагона
 . .
В центре масс кузова помещаем центрально-координатную систему  . Поскольку оси системы совпадают с осями симметрии кузова, то они будут являться главными осями тела инерции. . Поскольку оси системы совпадают с осями симметрии кузова, то они будут являться главными осями тела инерции.
Находим расстояние от центра масс вагона до уровня верха пружин рессорных комплектов:
 мм(4.2) мм(4.2)
где  – расстояние от оси автосцепки до верха пружин, – расстояние от оси автосцепки до верха пружин,  м. м.
Характеристики инерции определяются ускорениями колебаний  центра масс кузова по направлению координатных осей кузова. центра масс кузова по направлению координатных осей кузова.
Для определения характеристик инерции, в центрах масс элементов  устанавливаем местные координатные оси устанавливаем местные координатные оси  . При определении коэффициентов инерции . При определении коэффициентов инерции  задаем последовательно центру масс тела перемещения с ускорением задаем последовательно центру масс тела перемещения с ускорением  , находим в центрах масс элементов силы инерции , находим в центрах масс элементов силы инерции  и моменты сил инерции и моменты сил инерции  и от них реакции сил инерции и от них реакции сил инерции  в центре масс тела (рис. 4.2). в центре масс тела (рис. 4.2).
Реакции образуют матрицу коэффициентов инерции  . Поскольку оси кузова . Поскольку оси кузова  являются главными и центральными, то побочные реакции равны нулю ( являются главными и центральными, то побочные реакции равны нулю ( ). Тогда в качестве характеристик инерции будут выступать главные коэффициенты инерции тела ). Тогда в качестве характеристик инерции будут выступать главные коэффициенты инерции тела  . .
Поскольку оси параллельны осям координат тела  , то от коэффициенты масс и моментов инерции масс кузова будут равны: , то от коэффициенты масс и моментов инерции масс кузова будут равны:
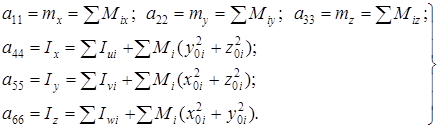 ,(4.3) ,(4.3)
где  – коэффициенты инерции масс от линейных ускорений ( – коэффициенты инерции масс от линейных ускорений ( ), кг; ), кг;
 – коэффициенты инерции масс от угловых ускорений ( – коэффициенты инерции масс от угловых ускорений ( ), кг×м2
; ), кг×м2
;
 – моменты инерции масс элементов относительно местных координатных осей , кг×м2
; – моменты инерции масс элементов относительно местных координатных осей , кг×м2
;
 – координаты центров тяжести элементов в системе координат . – координаты центров тяжести элементов в системе координат .
Таблица 4.2
Моменты инерции масс, 
| Название элемента
|
Ix
|
Iy
|
Iz
|
| Рама
|
1,91E+10
|
1,182E+11
|
1,313E+11
|
| Торцовая стена
|
4,54E+08
|
1,701E+10
|
1,701E+10
|
| Боковая стена
|
4,98E+09
|
2,893E+10
|
2,501E+10
|
| Крыша
|
6,47E+09
|
2,707E+10
|
3,213E+10
|
| Груз
|
8,83E+10
|
1,129E+12
|
1,13E+12
|
| Надрессорная балка
|
2,28E+09
|
1,534E+10
|
1,728E+10
|
| Ix общ
|
Iy общ
|
Iz общ
|
| 1,293E+11
|
1,4E+12
|
1,41E+12
|
Математической инерционной моделью кузова с произвольными координатными осями и центрально главными осями являются выражения (4.4, 4.5):
 (4.4) (4.4)
 (4.5) (4.5)
Таблица 5.1
Параметры пружин рессорного комплекта
| № п/п
|
Параметр
|
Наружная пружина, 
|
Внутренняя пружина, 
|
| 1
|
Средний диаметр, мм
Диаметр сечения пружины, мм
|


|


|
| 2
|
Число рабочих витков
|

|

|
| 3
|
Высота пружины в свободном состоянии, мм
|

|
|
Вертикальная жесткость блока двухрядной пружины
Жесткость двухрядной пружины равна сумме жесткостей наружной и внутренней однорядных пружин  : :
 ,(5.1) ,(5.1)
где  – номер однорядной пружины в блоке многорядной пружины – номер однорядной пружины в блоке многорядной пружины  . .
Жесткости наружной и внутренней пружин определяем по формуле:
 ,(5.2) ,(5.2)
где  – диаметр прутка; – диаметр прутка;
 – средний диаметр пружины; – средний диаметр пружины;
 – модуль упругости второго рода ( – модуль упругости второго рода ( Н/м2
). Н/м2
).
Жесткости наружной и внутренней пружин соответственно:
 ; ; . .
Жесткость одной двухрядной пружины равна:

Так как рессорный комплект состоит из 7 двухрядных пружин, то вертикальная жесткость рессорного комплекта составляет:
 ,(5.3) ,(5.3)
Поперечная жесткость однорядных пружин
Поперечная жесткость пружин определяется по формуле:
 , , (5.4) (5.4)
где  – боковая нагрузка на пружину; – боковая нагрузка на пружину;
 – поперечное смещение верхнего узла пружины при защемленных концах пружины: – поперечное смещение верхнего узла пружины при защемленных концах пружины:
 ,(5.5) ,(5.5)
где  - коэффициенты: - коэффициенты:
 (5.6) (5.6)
 , , – полярный и осевой моменты инерции сечения прутка однорядной пружины: – полярный и осевой моменты инерции сечения прутка однорядной пружины:
 (5.7) (5.7)
 – диаметр прутка однорядной пружины; – диаметр прутка однорядной пружины;
 – модули упругости первого и второго рода, ( – модули упругости первого и второго рода, (  Н/м2
). Н/м2
).
 – свободная высота пружины; – свободная высота пружины;
 – деформация рессорного комплекта под вертикальной нагрузкой: – деформация рессорного комплекта под вертикальной нагрузкой:
 ,(5.8) ,(5.8)
 - массы тары, тележки, надрессорной балки, груза; - массы тары, тележки, надрессорной балки, груза;
 – ускорение свободного падения, 9,8 м/с2
; – ускорение свободного падения, 9,8 м/с2
;
 – вертикальная нагрузка на один рессорный комплект, – вертикальная нагрузка на один рессорный комплект,  . .
Деформация рессорного комплекта под вертикальной нагрузкой равна:

Таблица 5.2
Значения коэффициентов и моментов инерции для пружин
| k1
, 1/Нм2
|
k2
, 1/Н
|
 , м4 , м4
|
 , м4 , м4
|
| Наружная пружина
|
9,44×10-5
|
3,64×10-6
|
7,95×10-8
|
3,97×10-8
|
| Внутренняя пружина
|
58,6×10-5
|
8,6×10-6
|
1,28×10-8
|
0,64×10-8
|
Поперечная жесткость наружной и внутренней пружин соответственно:
Поперечная жесткость двухрядной пружины и рессорного комплекта
Двухрядная пружина имеет жесткость:
 (5.9) (5.9)
Жесткость рессорного комплекта равна:
 (5.10) (5.10)
Последовательно задаем центру масс кузова перемещения  , строим схемы перемещений, находим перемещения , строим схемы перемещений, находим перемещения  упругих связей и по ним – деформации упругих связей и по ним – деформации  и усилия и усилия  по направлению координатных осей рессорного комплекта по направлению координатных осей рессорного комплекта  . .
Для грузового вагона, находящегося на жестком пути, возможными перемещениями являются:
q1
- перемещения от колебания подергивания;
q2
- от колебания подпрыгивания;
q3
- бокового относа:
q4
- бокового поворота;
q5
- колебания виляния;
q6
- колебания галопирования.
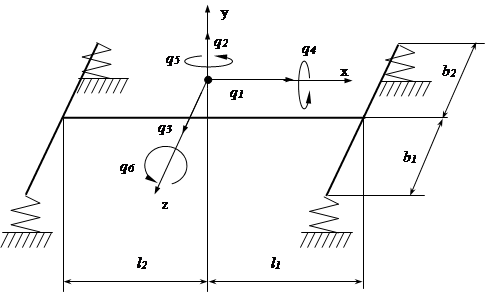
Рисунок 5.1 Расчетная схема вагона
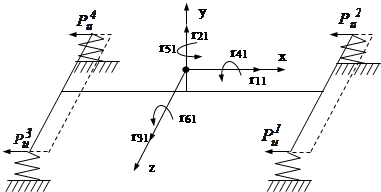
Рисунок 5.2 – Схема нагруженности от q1
1. Деформации: du
=U2
-U1
=q1
-0=1; dv
=V2
-V1
=0; dw
=W2
-W1
=0.
2. Силы упругости: Pu
=Cu
×du
=42,95×105
×1=42,95×105
(Н).
3. Реакции:
SX=0; r11
=4×Pu
=4×Cu
×du
=4×42,95×105
=171,8×105
(Н);SY=0; r21
=0;
SZ=0; r31
=0;SMx
=0; r41
=0;
SMy
=0; r51
-Pu
1
×b1
+Pu
2
×b2
-Pu
3
×b3
+Pu
4
×b4
=0; r51
=0 (вагон симметричный);
SMz
=0; r61
-4×Pu
(s)
×hc
*
=0; r61=
4×Pu
(s)
×hc
*
=4×42,95×105
×2,169=351,1×105
(Н×м).
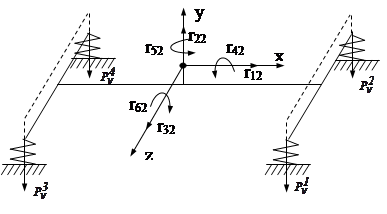
Рисунок 5.3 – Схема нагруженности от q2
1. Деформации: dv
=V2
-V1
=q2
-0=1.
2. Силы упругости: Pv
=Cv
×dv
=4×106
×1=4×106
(Н).
3. Реакции:
SX=0; r12
=0;
SY=0; r22
=4×Pv
=4×Cv
×dv
=4×4×106
×1=16×106
(Н);
SZ=0; r32
=0;
SMx
=0; r42
=0;
SMy
=0; r52
=0;
SMz
=0; r62
+Pv
1
×l1
+Pv
2
×l2
-Pv
3
×l3
-Pv
4
×l4
=0; r62
=0 (вагон симметричный).
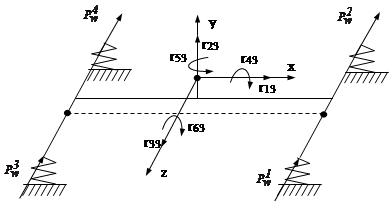
Рисунок 5.4 – Схема нагруженности от q3
1. Деформации: du
=U2
-U1
=0; dv
=V2
-V1
=0; dw
=W2
-W1
=q3
-0=1.
2. Силы упругости: Pw
=Cw
×dw
=42,95×105
×1=42,95×105
(Н).
3. Реакции:
SX=0; r13
=0;SY=0; r23
=0;
SZ=0; r33
=4×Pw
=4×Cw
×dw
=4×42,95×105
×1=171,8×105
(Н);
SMx
=0; r43
-Pw
1
×hc
*
-Pw
2
×hc
*
-Pw
3
×hc
*
-Pw
4
×hc
*
=0;
r43
=4×Pw
×hc
*
=4×42,95×105
×2,169=351,1×105
(Н×м)
SMy
=0; r53
=0 (вагон симметричный);
SMz
=0; r63
=0.
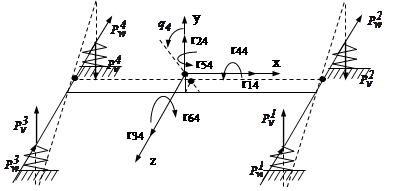
Рисунок 5.5 – Схема нагруженности от q4
1. Деформации: dv
1
=V2
-V1
=-b×q4
-0=1,018(м); dv
2
=V2
-V1
=b×q4
-0=1,018(м)
dw
=W2
-W1
=-hc
×q4
-0=2,044×1=2,044(м);
2. Силы упругости: Pv
=Cv
×dv
=4×106
1,018=4,072×106
(Н);
Pw
=Cw
×dw
=-Cw
×hc
=42,95×105
×2,044=87,777×105
(Н).
3. Реакции:
SX=0; r14
=0; SY=0; r24
+Pv
1
-Pv
2
+Pv
3
-Pv
4
=0; r24
=0 (вагон симметричный);
SZ=0; r34
+Pw
1
+Pw
2
+Pw
3
+Pw
4
=0; r34
= -4 Pw
=4×87,777×105
=351,1×105
(Н);
SMx
=0; r44
-Pv
1
×b1
-Pv
2
×b2
-Pv
3
×b3
-Pv
4
×b4
-Pw
1
×hc
*
-Pw
2
×hc
*
-Pw
3
×hc
*
-Pw
4
×hc
*
=0; r44
=4Pv
×b+4Pw
×hc
*
=4×4,072×106
1,018+4×87,777×105
×2,169=927,3×105
(Н×м);
SMy
=0; r54
- Pw
1
×l1
-Pw
2
×l2
-Pw
3
×l3
-Pw
4
× l4
=0; r54
=0 (вагон симметричный);
SMz
=0; r64
-Pv
1
×l1
+Pv
2
×l2
+Pv
3
×l3
-Pv
4
×l4
=0; r64
=0 (вагон симметричный).
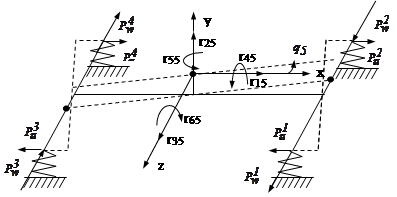
Рисунок 5.6 – Схема нагруженности от q5
1. Деформации: du
1
=U2
-U1
=b1
×q5
-0=1,018(м); du
2
=U2
-U1
=-b1
×q5
-0=1,018(м);
dv
=V2
-V1
=0; dw
1
=W2
-W1
=-l1
×q5
-0=5(м); dw
3
=l3
×q5
-0=5(м).
2. Силы упругости: Pu
=Cu
×du
=42,95×105
×1,018=43,723×105
(Н);
Pw
1
=Cw
×dw
1
=-Cw
×l1
=42,95×105
×5=214,75×105
(Н).
3. Реакции:
SX=0; r15
=0;SY=0; r25
=0;
SZ=0; r35
+Pw
1
+Pw
2
-Pw
3
-Pw
4
=0; r35
=0 (вагон симметричный);
SMx
=0; r45
-Pw
1
×hc
*
-Pw
2
×hc
*
+Pw
3
×hc
*
+Pw
4
×hc
*
=0; r45
=0 (вагон симметричный);
SMy
=0; r55
-Pu
1
×b1
-Pu
2
×b2
-Pu
3
×b3
-Pu
4
×b4
-Pw
1
×l1
-Pw
2
×l2
-Pw
3
×l3
-Pw
4
× l4
=0;
r55
=4×Pu
×b+4×Pw
×l=4×43,723×105
×1,018+4×214,75×105
×5=447,3×106
(Н×м);
SMz
=0; r65
+Pu
1
×hc
*
-Pu
2
×hc
*
+ Pv
3
×hc
*
-Pu
4
×hc
*
=0; r65
=0 (вагон симметричный).
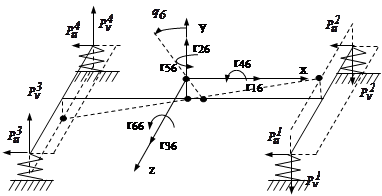
Рисунок 5.7 – Схема нагруженности от q6
1. Деформации: du
=U2
-U1
=hc
×q6
-0=2,044(м); dv
1
=dv
2
=V2
-V1
=l1
×q6
-0=5(м);
dv
3
=dv
4
=V2
-V1
=l3
×q6
-0=5(м).
2. Силы упругости: Pu
=Cu
×du
=42,95×105
×2,044=87,777×105
(Н);
Pv
=Cv
×dv
=4×106
×5=2×107
(Н).
3. Реакции:
SX=0; r16
=4×Cu
×hc
=4×42,95×105
×2,044=351,1×105
(Н);
SY=0; r26
-Pv
1
-Pv
2
+Pv
3
+Pv
4
=0; r26
=0 (вагон симметричный);
SZ=0; r36
=0;
SMx
=0; r46
+Pv
1
×b1
-Pv
2
×b2
-Pv
3
×b3
+Pv
4
×b4
= 0; r46
=0 (вагон симметричный)
SMy
=0; r56
-Pu
1
×b1
+Pu
2
×b2
-Pu
3
×b3
+Pu
4
×b4
=0; r56
=0 (вагон симметричный);
SMz
=0; r66
-Pu
1
×hc
*
-Pu
2
×hc
*
-Pu
3
×hc
*
-Pu
4
×hc
*
-Pv
1
×l1
-Pv
2
×l2
-Pv
3
×l3
-Pv
4
×l4
=0;
r66
=4×87,777×105
×2,169+4×2×107
×5=476,1×106
(Н×м).
На кузов вагона действует система реакций сил упругости, обусловленная колебаниями  . Реакции в связях . Реакции в связях  по направлению координатных осей от по направлению координатных осей от  .суммируются, образуя в узле вектор реактивных усилий: .суммируются, образуя в узле вектор реактивных усилий:
 (5.12) (5.12)
где  – матрица коэффициентов жесткости несимметричного вагона: – матрица коэффициентов жесткости несимметричного вагона:
 ,(5.13) ,(5.13)
 – вектор перемещений центра масс кузова вагона. – вектор перемещений центра масс кузова вагона.
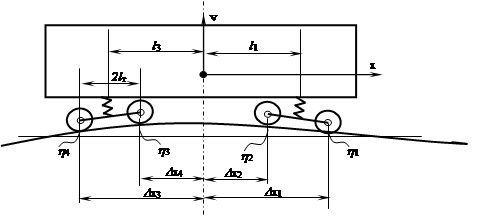
Рисунок 6.
1 - Схема для расчета перемещения колесных пар
Нагруженность характеризуется силами упругости в рессорном подвешивании  и реакциями сил упругости в центрах масс тел и реакциями сил упругости в центрах масс тел  . Динамическая система получает гармонические возмущения от неровности пути через колесные пары по схеме рисунок 6.1. За начало отсчета принимаем систему координат кузова . Динамическая система получает гармонические возмущения от неровности пути через колесные пары по схеме рисунок 6.1. За начало отсчета принимаем систему координат кузова  . Перемещения колес первой тележки по отношению к центру масс кузова имеют опережения, а второй – отставание по фазе, учитываемые углами сдвига фаз . Перемещения колес первой тележки по отношению к центру масс кузова имеют опережения, а второй – отставание по фазе, учитываемые углами сдвига фаз  : :
 ,(6.1) ,(6.1)
где  – углы сдвига фаз в перемещениях колесных пар: – углы сдвига фаз в перемещениях колесных пар:
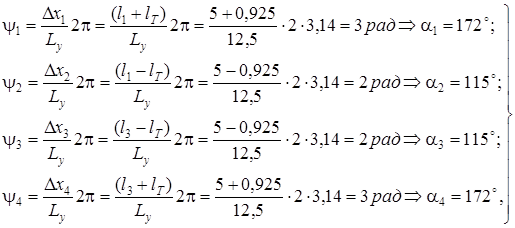 ,(6.2) ,(6.2)
 – амплитуда и длина волны вертикальной неровности пути; – амплитуда и длина волны вертикальной неровности пути;
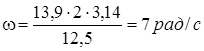
 – частота вынужденных кинематических возмущений, – частота вынужденных кинематических возмущений,
 (6.3) (6.3)
При средней скорости движения вагона  получим: получим:
Перемещения буксовых узлов  равны перемещениям точек контакта колес с рельсами (рисунок 6.1): равны перемещениям точек контакта колес с рельсами (рисунок 6.1):
 (6.4) (6.4)
Из схем перемещений боковых рам находим перемещения нижних опорных поверхностей рессорных комплектов:
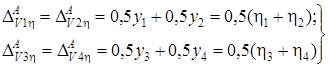 (6.5) (6.5)
Деформации и силы упругости в виброзащитных связях  при значениях перемещений (6.5) составляют: при значениях перемещений (6.5) составляют:
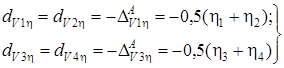 (6.6) (6.6)
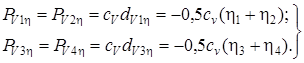 (6.7) (6.7)
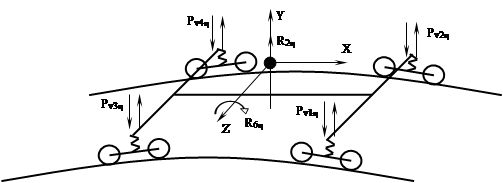
Рисунок 6.2 – Расчетная схема для определения возмущающей нагрузки
Изначально силы упругости  (6.7) в рессорном подвешивании на схемах (рисунок 6.2) положительны. (6.7) в рессорном подвешивании на схемах (рисунок 6.2) положительны.
Силы упругости (6.7) вызывают в связях центрально-координатного узла кузова реакции возмущающих нагрузок (рисунок 6.2). Из равновесия кузова вектор кинематических возмущающих нагрузок равен:
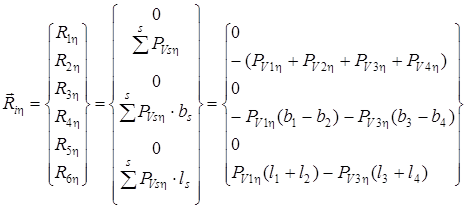 ,(6.8) ,(6.8)
где  . .
При значениях сил (6.7) и (6.4) реакции (6.8) принимают значения:
 (6.9) (6.9)
 (6.10) (6.10)
 (6.11) (6.11)
В несимметричном вагоне возмущающие усилия  вызывают колебания вызывают колебания  . Поскольку колебания . Поскольку колебания  через реакции через реакции  связаны с связаны с  , а последние через реакции , а последние через реакции  с с  (5.12 ), то возникают все колебания кузова (5.12 ), то возникают все колебания кузова  . Кузов испытывает сложные вынужденные колебания. . Кузов испытывает сложные вынужденные колебания.
В симметричном вагоне при  линейные реакции (6.9) не меняются, а угловые – (6.10), (6.11) становятся равными: линейные реакции (6.9) не меняются, а угловые – (6.10), (6.11) становятся равными:
 (6.12) (6.12)
Возмущающие реакции  вызовут в системе колебания вызовут в системе колебания  и и  . Колебание . Колебание  возникает вследствие взаимосвязи через реакции возникает вследствие взаимосвязи через реакции  . Если реакции малы . Если реакции малы  , то будем иметь только два вида колебаний - , то будем иметь только два вида колебаний -  и и  . .
В реакциях возмущения от колесных пар сдвинуты по фазе ( ), что создает некоторые затруднения в решении задачи. Для упрощения решения сложим составляющие гармонических возмущений в этих реакциях. Сложение выполним графическим способом, используя интерпретацию вращающихся векторов и их проекций на горизонтальную ось ), что создает некоторые затруднения в решении задачи. Для упрощения решения сложим составляющие гармонических возмущений в этих реакциях. Сложение выполним графическим способом, используя интерпретацию вращающихся векторов и их проекций на горизонтальную ось  . .
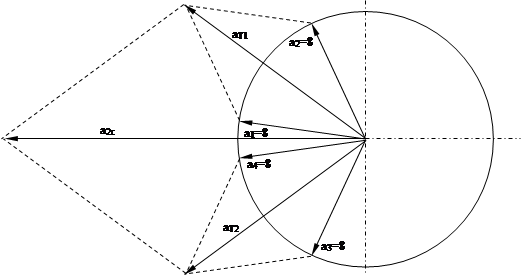
Рисунок 6.3 – Векторная диаграмма
Для сложения функций в реакции  (6.9), проведем радиусом, равным амплитуде кинематического возмущения (6.9), проведем радиусом, равным амплитуде кинематического возмущения  , окружность и в соответствии с углами сдвига фаз , окружность и в соответствии с углами сдвига фаз  , отложим последовательно амплитуды возмущений , отложим последовательно амплитуды возмущений  по колесным парам (рисунок 6.3). Сложим векторы амплитуд по колесным парам (рисунок 6.3). Сложим векторы амплитуд  , ,  и и  , ,  в тележках и получаем значения в тележках и получаем значения   . . Выполнив сложение векторов   по тележкам, находим эквивалентную амплитуду вектора возмущений для вагона – по тележкам, находим эквивалентную амплитуду вектора возмущений для вагона –  , которая соответствует колебанию . , которая соответствует колебанию .
Из векторной диаграммы определяем:  . .
Проекция вектора  на горизонтальную ось дает функцию суммарного возмущения на вагон: на горизонтальную ось дает функцию суммарного возмущения на вагон:
 (6.13) (6.13)
Эта функция заменяет выражение, стоящее в фигурных скобках (6.9). Значение суммарной возмущающей реакции на вагон теперь равно:
 (6.14) (6.14)
где  – амплитуда возмущающей силы по колебанию подпрыгивания, – амплитуда возмущающей силы по колебанию подпрыгивания,  . .
Аналогично изложенному производим сложение возмущающих функций в реакции  . Знак минус во второй квадратной скобке учитывается изменением направления вектора . Знак минус во второй квадратной скобке учитывается изменением направления вектора  на обратный. на обратный.
Суммарное значение возмущающей функции по колебанию галопирования равно:
 ,(6.15) ,(6.15)
где  - амплитуда возмущающей силы по колебанию галопирования. - амплитуда возмущающей силы по колебанию галопирования.
Выводы:
1. Наибольшие значения сил вертикальных возмущений  получим, если векторы амплитуд возмущений по тележкам получим, если векторы амплитуд возмущений по тележкам   будут совпадать. Это произойдет в случае равенства базы вагона длине волны неровности. При этом реакция возмущений по шестому колебанию становится бесконечно малой, будут совпадать. Это произойдет в случае равенства базы вагона длине волны неровности. При этом реакция возмущений по шестому колебанию становится бесконечно малой,  . .
2. Наибольшего значения реакция  достигает, когда совпадают векторы амплитуд колебаний достигает, когда совпадают векторы амплитуд колебаний   . Это происходит в случае, когда база вагона равна половине длины неровности пути . Это происходит в случае, когда база вагона равна половине длины неровности пути  . Однако в этом случае реакция возмущений по колебанию подпрыгивания обращается в ноль, . Однако в этом случае реакция возмущений по колебанию подпрыгивания обращается в ноль,  . .
Математической моделью является система дифференциальных уравнений, описывающая колебания вагона в функции времени.
Уравнения колебаний получаем из уравнения динамического равновесия реакций в центрально-координатном узле кузова, суммируя реакции по блок-моделям силовых подсистем: инерционной, виброзащитной, внешних возмущений. Для несимметричного вагона, с центрально-главными осями система уравнений колебаний равна:
 (6.16) (6.16)
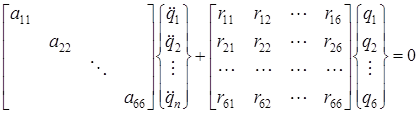
Уравнения колебаний системы в матричном представлении:
· в развернутой форме:
 (6.17) (6.17)
· в сокращенной форме записи:
 (6.18) (6.18)
Для симметричного вагона, из-за отсутствия многих побочных реакций, получаем независимые уравнения колебаний:
 (6.19) (6.19)
и взаимосвязанные уравнения боковых колебаний:
 (6.20) (6.20)
Уравнения колебаний (6.16 – 6.20) описывают совместные свободные и вынужденные колебания вагона. Рассмотрим динамику свободных и вынужденных колебаний.
Свободные колебания наблюдаются при прекращении действия возмущающих сил  или при изменении силовых характеристик динамической системы. или при изменении силовых характеристик динамической системы.
Уравнения свободных колебаний кузова вагона, в системе главных, центрально-координатных осей:
· для несимметричного вагона по реакциям сил упругости:
в развернутой форме:
 ,(7.1) ,(7.1)
в развернуто-матричной форме:
 ,(7.2) ,(7.2)
· для симметричного вагона по реакциям сил инерции и упругости:
 (7.3) (7.3)
 (7.4) (7.4)
Решениями однородных уравнений (7.1 – 7.4) являются тригонометрические функции:
 (7.5) (7.5)
Или в общем виде:
 (7.6) (7.6)
Вторые производные  являются ускорениями колебаний тела: являются ускорениями колебаний тела:
 ,(7.7) ,(7.7)
где  – амплитуда свободных колебаний; – амплитуда свободных колебаний;
 - частота свободных колебаний. - частота свободных колебаний.
Подставляя  и и  в уравнения свободных колебаний (7.1 – 7.4), получаем уравнения колебаний в алгебраической форме: в уравнения свободных колебаний (7.1 – 7.4), получаем уравнения колебаний в алгебраической форме:
 ,(7.8) ,(7.8)
 ,(7.9) ,(7.9)
 (7.10) (7.10)
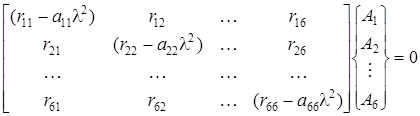
В полученных уравнениях амплитуды колебаний  не равны нулю, поскольку система колеблется. Чтобы тождества удовлетворялись, необходимо равенство нулю определителей составленных из коэффициентов при неизвестных амплитудах, то есть: не равны нулю, поскольку система колеблется. Чтобы тождества удовлетворялись, необходимо равенство нулю определителей составленных из коэффициентов при неизвестных амплитудах, то есть:
· для несимметричного вагона
 ,(7.11) ,(7.11)
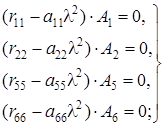
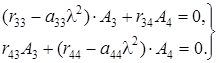
· для симметричного вагона
 (7.12) (7.12)
 (7.13) (7.13)
Полученные уравнения (7.11 – 7.13) являются уравнениями частот. Из решения уравнения (7.12), находим частоты свободных колебаний, 1/с:
  (7.14) (7.14)
Раскрывая определитель (7.13), получаем выражение вида
 (7.15) (7.15)
После преобразования (7.15) приходим к характеристическому уравнению:
 ,(7.16) ,(7.16)
где  – частотный параметр, – частотный параметр,  . .
Из уравнения (7.16) корни равны:
Частными решениями для симметричного вагона являются функции:
· для независимых колебаний:
 (7.19) (7.19)
· для взаимосвязанных боковых колебаний:
 (7.20) (7.20)
Частным решениям (7.19) отвечают формы колебаний подергивания, подпрыгивания, виляния, галопирования. Решениям уравнений (7.20) соответствуют колебания боковой качки I и II рода.
При движении по гармонической неровности пути реактивные усилия  в симметричном вагоне вызывают колебания подпрыгивания и галопирования, которые описываются уравнениями (6.19): в симметричном вагоне вызывают колебания подпрыгивания и галопирования, которые описываются уравнениями (6.19):
 (8.1) (8.1)
 (8.2) (8.2)
Уравнения (8.1) и (8.2) однотипны. Проследим решение одного из уравнений, например, колебания подпрыгивания. Другое будет решаться аналогично первому.
Общее решение уравнения (8.1) складывается из частного решения однородного уравнения (без первой части) и частного решения неоднородного уравнения (с правой частью):
 (8.3) (8.3)
Частное решение  отвечает свободным колебаниям системы (рис.8.1,б), а частное решение отвечает свободным колебаниям системы (рис.8.1,б), а частное решение  - вынужденным (рис. 8.1,а). - вынужденным (рис. 8.1,а).
Произвольные постоянные  являются амплитудами свободных и вынужденных колебаний. являются амплитудами свободных и вынужденных колебаний.
Если подставим частные производные  , ,  соответственно в однородное и неоднородные уравнения, то найдем соответственно в однородное и неоднородные уравнения, то найдем
 (8.4) (8.4)
Общее решение (8.3) представится теперь в виде:
 (8.5) (8.5)
Возможны следующие случаи колебаний системы:
· нерезонансный, когда  ; ;
· резонансный, когда  ; ;
· случай близкий к резонансному,  . .
Резонансным случаем (режимом) колебаний считают тот, когда различия между частотами составляет не более 15%.
Колебания в нерезонансной области
При отклонении вагона от положения статического равновесия на величину  , вагон совершает гармонические колебания, определяемые первым членом уравнения (8.5). При воздействии на вагон только возмущающих нагрузок вагон совершает гармонические колебания с частотой , вагон совершает гармонические колебания, определяемые первым членом уравнения (8.5). При воздействии на вагон только возмущающих нагрузок вагон совершает гармонические колебания с частотой  и амплитудой и амплитудой  . Закон колебаний определяется вторым членом уравнения (8.5). В случае воздействия на вагон одновременно начальных возмущений . Закон колебаний определяется вторым членом уравнения (8.5). В случае воздействия на вагон одновременно начальных возмущений  и возмущающих нагрузок и возмущающих нагрузок  движения вагона определяются общим уравнением (8.5). движения вагона определяются общим уравнением (8.5).
Из-за наличия в системе сил трения, свободные колебания с течением времени затухают и движение системы определяется вторым членом уравнения (8.5).
Колебания вагона в резонансном и близким к резонансу режимах
Считаем, что частоты возмущений близки к частоте свободных колебаний:
 (8.6) (8.6)
где  – бесконечно малая величина. – бесконечно малая величина.
Динамика вагона определяется законом движения (8.5) с учетом значений параметров (8.4).
Произвольные постоянные  в решении (8.5) найдем из начальных условий движений системы. Полагаем, в начальный момент движения в решении (8.5) найдем из начальных условий движений системы. Полагаем, в начальный момент движения  перемещение и скорость были равны нулю, то есть: перемещение и скорость были равны нулю, то есть:
 (8.7) (8.7)
Из решения системы (8.7) находим:
 (8.8) (8.8)
Общее решение (8.5) с учетом (8.8) и последующим ее преобразованием через тригонометрические функции половинных углов принимает вид:
 (8.9) (8.9)
Периоды тригонометрических функций равны:
 (8.10) (8.10)

Рисунок 8.1 - График колебаний биения
Период  , поскольку , поскольку  - бесконечно малая величина. Закон колебаний системы по условию (8.9) показан на рисунке 8.1. Колебания заданного вида называют колебаниями биения. - бесконечно малая величина. Закон колебаний системы по условию (8.9) показан на рисунке 8.1. Колебания заданного вида называют колебаниями биения.
При более близком совпадении частот, в выражении (8.9) можно принять  . Тогда закон колебаний подпрыгивания при учете значения (8.8) будет выражен функцией: . Тогда закон колебаний подпрыгивания при учете значения (8.8) будет выражен функцией:
 (8.11) (8.11)
Колебания пропорциональны времени  и нарастают с течением времени (рисунок 8.2). и нарастают с течением времени (рисунок 8.2).
Рисунок 8.2 - График колебаний
За время одного цикла колебаний  происходит приращение амплитуд колебаний на величину: происходит приращение амплитуд колебаний на величину:
 ,(8.12) ,(8.12)
Аналогично изложенному можно решить уравнение колебаний галопирования (8.2) и найти параметры колебаний:
 (8.13) (8.13)
Выводы:
1. Колебания динамической системы без сил трения опасны тем, что в резонансном и околорезонансном режимах происходят значительные нарастания амплитуд колебаний. Возникает обезгрузка колесных пар и потеря их устойчивости против вкатывания на головку рельса. Возможны саморасцепы вагонов.
2. Уровень колебаний определяется величиной возмущающих нагрузок  , а последние соотношениями: , а последние соотношениями:
· длины базы вагона и неровности пути;
· частот вынужденных  и свободных колебаний ( и свободных колебаний ( ). ).
3. Для снижения колебаний необходимо ввести в рессорное подвешивание диссипативные силы: вязкого или сухого трения.
Параметры гасителей сухого трения
Необходимые значения сил трения гасителей в первом приближении определим из условия энергетического принципа.
Работа сил трения гасителей за один период колебаний должна равняться приращению потенциальной энергии рессорного подвешивания вагона за тот же период:
 (8.14) (8.14)
где  – число гасителей и рессор в вагоне. – число гасителей и рессор в вагоне.
 – работа сил трения и приращение потенциальной энергии в рессорном комплекте при колебании по оси – работа сил трения и приращение потенциальной энергии в рессорном комплекте при колебании по оси  . .
Работу сил сухого трения фрикционного гасителя найдем по площади гистерезисной петли силовой характеристики гасителя (рис.8.3, а):
 ,(8.15) ,(8.15)
а приращение потенциальной энергии – по работе сил упругости (рис. 8.3,б):
 ,(8.16) ,(8.16)
где  – силы трения при сжатии и растяжении гасителя в среднем положении; – силы трения при сжатии и растяжении гасителя в среднем положении;
 – амплитуда деформаций рессор и гасителя; – амплитуда деформаций рессор и гасителя;
 – приращение деформаций рессор за период колебаний; – приращение деформаций рессор за период колебаний;
 – силы упругости в начале и в конце периода колебания рессорного комплекта: – силы упругости в начале и в конце периода колебания рессорного комплекта:
 ,(8.17) ,(8.17)
 – вертикальная жесткость рессорного комплекта. – вертикальная жесткость рессорного комплекта.

Рисунок 8.3–Работа сил трения
Для вагона условие энергетического баланса имеем равное:
 (8.18) (8.18)
Откуда требуемые значения сил трения, при допущении  в виду малости, получаем равным: в виду малости, получаем равным:
 (8.19) (8.19)
Приращение вертикальных деформаций рессор находим по приращению амплитуд колебаний подпрыгивания и галопирования:
 (8.20) (8.20)
где  - полубаза вагона. - полубаза вагона.
Принято силы трения оценивать через удельные характеристики – коэффициенты относительной сил трения при сжатии  и растяжении и растяжении  . .
 (8.21) (8.21)
где  – сила упругости в рессорном подвешивании от статических нагрузок. – сила упругости в рессорном подвешивании от статических нагрузок.
 (8.22) (8.22)
и тогда выражение (8.19) представим как
 (8.23) (8.23)
Или
 (8.24) (8.24)

где  - средняя требуемая величина коэффициента относительного трения гасителя колебаний. - средняя требуемая величина коэффициента относительного трения гасителя колебаний.
Таким же образом можно получить параметр  . По колебаниям подпрыгивания и галопирования выбирают наибольшее. Значение принятого коэффициента относительного трения для расчета гасителей колебаний является приближенным и в последующих исследованиях уточняется в динамических системах с сухим трением в рессорном подвешивании. . По колебаниям подпрыгивания и галопирования выбирают наибольшее. Значение принятого коэффициента относительного трения для расчета гасителей колебаний является приближенным и в последующих исследованиях уточняется в динамических системах с сухим трением в рессорном подвешивании.
На основании энергетического способа могут быть определены параметры гасителей вязкого трения.
Работа сил трения гидравлического гасителя колебаний равна:
 (8.25) (8.25)
Откуда на основании энергетического принципа:
 (8.26) (8.26)

1. Вершинский, С.В., Данилов, В.Н., Хусидов, В.Д. Динамика вагона: Учебник для вузов ж.-д. трансп./Под ред. С.В. Вершинского. – М.: Транспорт, 1991. – 360 с.
2. Сенаторов, С.А. Прогнозирование нагруженности, износа и динамики подвижного состава: Ч.1. Динамические системы подвижного состава и методы их исследования. Уч. пособ. – Екатеринбург: Изд. УЭМИИТ, 1996 - 104 с.
3. Сенаторов, С.А. Прогнозирование нагруженности, износа и динамики подвижного состава: Ч.2. Инерционные модели динамических систем подвижного состава. Уч.пособ. – Екатеринбург: Изд. УЭМИИТ, 1996. – 71 с.
|