Введение
В настоящее время остро стоит проблема управления транспортными потоками, особенно в больших городах. Увеличение количества транспортных средств (ТС) как личных, так и общественных, привело к перегруженности городских дорог, многочасовым пробкам, затруднению движения пешеходов, увеличению количества аварий и т.д.
Объектом управления в системе управления дорожным движением является транспортный поток, состоящий из технических средств (автомобилей, мотоциклов, автобусов и так далее). В то же время водители автомобилей ведут себя на дороге и реагируют на различные события по-разному, не всегда предсказуемо, что значительно усложняет анализ такой системы. Таким образом, дорожное движение представляет собой техносоциальную систему, что и определяет его специфику как объекта управления. Даже рассматривая только технические аспекты управления дорожным движением, необходимо иметь в виду, что этот объект весьма своеобразен и сложен с точки зрения управления его свойствами.
Городские транспортные потоки обладают следующими особенностями.
Во-первых, это стохастичность транспортных потоков: их характеристики допускают прогноз только с определенной вероятностью. Транспортный поток движется по транспортной сети, которая также обладает определенными характеристиками, допускающими более или менее строгое описание, и которые являются нестационарными.
Во-вторых, это нестационарность транспортных потоков, причем колебания их характеристик происходят как минимум в трех циклах: суточном, недельном и сезонном.
В-третьих, это неполная управляемость, суть которой состоит в том, что даже при наличии полной информации о потоках и возможности информирования водителей о необходимых действиях, эти требования носят рекомендательный характер. Следовательно, достижение глобального экстремума любого критерия управления становится весьма проблематичным.
В-четвертых, это множественность критериев качества, таких как: задержка в пути, средняя скорость движения, прогнозируемое число ДТП, объем вредных выбросов в атмосферу и т.д. Большинство характеристик взаимосвязаны и выделить какую-либо одну не представляется возможным.
Пятой особенностью дорожного движения как объекта управления является сложность и даже невозможность замера даже основных характеристик, определяющих качество управления. Так, оценка величины интенсивности движения требует либо наличия датчиков транспортных потоков на всех направлениях их движения, либо использования данных аэрофотосъемки, либо проведения трудоемкого ручного обследования.
Особенности транспортных систем делают невозможным построение адекватной аналитической модели, позволяющей исследовать варианты управления в этой системе и ее характеристики в различных условиях. В то же время имитационное моделирование как метод исследования подобных объектов представляется обещающим подходом к решению этой проблемы: оно позволяет быстро и с хорошей точностью прогнозировать характеристики сложных систем подобной природы и оптимизировать существенные параметры, выбирая соответствующие параметры оптимизации.
4.1. Структурные представления дорожного движения
Оценка качества управления дорожным движением и проектных решений в сфере организации дорожного движения, особенно для сложных объектов, комплексных схем организации движения городов с населением выше 500 тыс. жителей, временных схем организации движения на период перекрытия значительных участков уличной сети сопряжена с необходимостью учета достаточно большого количества данных для разрешения противоречий неопределенности объективного и субъективного характера В основном эти трудности обусловлены отсутствием надежных методов прогнозирования распределения транспортных потоков в пределах района, охваченного светофорной сетью АСУДД, при различных вариантах принимаемых решений по управлению. Это, в свою очередь, связано с наличием значительного числа факторов, влияющих на интенсивность движения автомобильного транспорта и распределение транспортных потоков по участкам уличной сети.
К таким факторам относятся:
- топологические характеристики, отражающие геометрическую структуру УДС и параметры ее отдельных элементов (например, ширина в проезжей части, конфигурация перекрестков, транспортных развязок);
- факторы, связанные собственно с организацией движения (одностороннее движение, запреты маневров на перекрестках, запреты движения грузового транспорта);
- факторы, обусловленные наличием светофорного регулирования (схемы пофазного разъезда и параметры светофорного регулирования, характеристики регулируемых направлений, наличие координированного управления светофорными объектами);
- характеристики дорожного покрытия, отражающие его состояние и влияющие на условия и скорость движения транспорта;
- факторы, связанные с наличием пешеходных потоков и организацией движения пешеходов (дислокация нерегулируемых и регулируемых пешеходных переходов, наличие пешеходных ограждений);
- факторы, связанные с движением маршрутного общественного транспорта (интенсивность движения маршрутных автобусов и троллейбусов, дислокация остановок трамваев при расположении трамвайного полотна в одном уровне с проезжей частью и частота движения трамваев);
- факторы, связанные с парковкой транспортных средств на проезжей части, создающей помехи движению транспортного потока.
Очевидно, что учесть все многообразие этих факторов экспертным путем для построения прогнозных распределений потоков можно лишь для небольших участков УДС. Оптимизация автоматизированного управления в сложных схемах организации движения требует создания и использования компьютерных моделей.
Помимо перечисленных факторов, на интенсивность транспортных потоков на улично-дорожной сети решающее влияние оказывает спрос на передвижение на автомобильном транспорте, характер которого существенно изменился за последнее десятилетие как в количественном, так и в качественном отношении. Экономические изменения, происшедшие на Украине в этот период, привели не только к многократному росту уровня автомобилизации, но и резкому увеличению доли деловых передвижений, которые в настоящее время определяют пиковые нагрузки на городских магистралях.
Существовавшие до настоящего времени модели транспортных потоков ориентированы скорее на градостроительное проектирование, чем на задачи управления дорожным движением [4]. Отсутствует и опыт определения спроса на деловые передвижения на автомобильном транспорте. Кроме того, нет единого мнения о том, как оценивать эффективность управления дорожным движением.
После того как новое поколение сформировано, потомки становятся родительскими особями и, в свою очередь, порождают новое поколение.
Условиями для завершения поиска экстремума по генетическому алгоритму могут быть:
- ограничение числа поколений (например, 10);
- завершение работы алгоритма при относительном изменении минимального значения функционала менее чем на 0,1% относительно предыдущего поколения:
Для расчета целевой функции Fe применением методов и алгоритмов необходимо разработать программное обеспечение и создать информационное обеспечение системы, включающее :
- интенсивность движения по магистралям города;
- количество полос для движения автотранспортных потоков на перегонах между светофорными объектами; возможные направления движения автомобилей по каждой из магистралей;
- характеристики автомобилей, участвующих в дорожном движении;
- существующие ограничения скорости.
Кроме этих данных, необходима информация о структуре уличной сети, о существующих фазах светофорных объектов (СО), режимах работы, ПК, количестве СО, входящих в состав АСУДД города. Вся указанная информация заносится оператором в базу данных. На первом этапе предусматривается применение статической базы данных. Однако система может функционировать также с динамической базой данных, формируемой автоматически в режиме реального времени путем обработки сигналов от датчиков движения, которые установлены на магистралях или перекрестках города.
Информационная поддержка АСУДД выполнена в рамках базы данных, реализованной средствами СУБДACCESS. Данная СУБД предполагает также возможность использования программируемых расчетных модулей. Поэтому в качестве технических средств реализации АСУ выбрана среда СУБДACCESS. Такой подход позволяет за счет использования стандартных функций организовать передачу в базу данных информации от различных внешних устройств.
Особенностью предлагаемого подхода является возможность реализации АСУ в условиях реального управления дорожным движением. Для принятия обоснованных решений предполагается дополнительно к используемым параметрам учитывать результаты моделирования отдельных элементов уличной сети, а также отдельных планов координации для районов города. При этом на основе предложенных подходов можно оптимизировать управление дорожным движением с применением в качестве целевой функции уровня экологического риска либо суммарных задержек автотранспорта на перегонах уличной сети города по всем направлениям движения.
4.2. Обоснование и выбор целевой функции АСУ дорожным
движением
Эффективность управления дорожным движением можно оценивать множеством критериев, зависящих от управления. В качестве целевой функции управления дорожным движением могут быть использованы величины: объем вредных выбросов в атмосферу, общее время проезда по маршруту, число остановок за одну поездку, коэффициент пропуска, средняя задержка экипажа за цикл, средние простои из-за задержек [3], скорость сообщения, число ДТП, интенсивность движения [6], общее время задержек транспортных средств на перекрестках. Большинство перечисленных характеристик дорожного движения взаимосвязано [6].
Целевая функция может быть определена по результатам натурных размеров либо по данным математического моделирования. Математическая модель представляет собой некоторое упрощенное представление реальной системы и, не зависимо от ее детализации и сложности, может претендовать на единственно правильное отражение изучаемых процессов. Одним из условий существенности разрабатываемых моделей является отображение параметров, которые составляют целевую функцию.
Например, целевую функцию для определения затрат времени на передвижение автомобиля из одного пункта в другой через регулируемые перекрестки можно представить оператором:
 (4.2) (4.2)
где S
— расстояние, которое должен проехать автомобиль; V
ср
— средняя скорость движения автомобиля;
ф
— суммарное время задержки автомобиля на регулируемых перекрестках.
Аналогичным образом можно описать и функцию для определения расхода горючего автомобилем при движении через регулируемые перекрестки из одного пункта в другой:
 (4.3) (4.3)
где О
— объем двигателя автомобиля.
Усредненные в целом по г.Одессе данные о загрязнении атмосферного воздуха отражают неблагоприятную экологическую обстановку практически во всех районах города [2, 10]. Средняя концентрация оксида углерода равна 7,2 мг/м3
(2,4 ПДКсс), а концентрация оксидов азота составляет 0,11 мг/м3
(2,75 ПДКсс). Максимальный уровень загрязнения регистрируется в районе Пересыпьских мостов (пост Херсонский сквер) и на ул. Черноморского казачества. На этих постах Госметеоцентр Черного и Азовского морей регистрирует более чем трехкратное превышение ПДКсс предельно допустимых среднесуточных концентраций оксида углерода. Указанные посты размещены вблизи транспортных магистралей.
Существующий уровень загрязнения атмосферного воздуха в г.Одессе представляет угрозу для населения и окружающей природной среды. В связи с этим представляется необходимым оценить возможность применения в качестве целевой функции величины экологического риска, который определяется в зависимости от уровня загрязнения атмосферного воздуха выхлопными газами автомобилей.
4.2.1. Методика расчета экологического риска
Как известно, для характеристики и оценки качества окружающей среды используется нормативный подход, ориентированный на концепцию предельно допустимых концентраций (ПДК) [7].
Нормативный подход [7, 8], создавая видимость существования экологических норм, не позволяет оценить ущерб и потери общества из-за ухудшения качества среды обитания по сравнению с допустимыми санитарно-гигиеническими нормами. Единственный вывод, который следует из сопоставления фактического состояния окружающей среды с нормативными данными, состоит в следующем: если есть превышение значений параметров среды над нормативами, то это опасно. Для численной оценки риска необходимо обращаться к статистическим данным о состоянии здоровья населения, которые фиксируют уже свершившийся факт, когда последствия нельзя изменить, а тем более нельзя предотвратить.
Для достижения поставленной цели необходимо исследовать влияние факторов из выше приведенных групп на время движения легковых автомобилей.
Движение автомобилей осуществляется по существующей улично-дорожной сети. Всю трассу маршрута движения автомобилей можно разбить на две составляющие:
- перегоны;
- перекрестки улично-дорожной сети.
Данное деление трассы маршрута целесообразно, вследствие различных условий движения на этих составляющих. прегонах автомобили двигаются без существенного изменения направления движения в потоке транспортных средств. На перекрестках возможно изменение направления движения автомобилей, что может существенным образом повлиять на скорость их движения. Кроме того, на перекрестках автомобиль может вступать во взаимодействие с транспортными потоками конфликтующих направлений, что также может сказаться на времени проследования перекрестков. Более того, перекрестки являются местами концентрации дорожно-транспортных происшествий [12, 14], и водитель обязан выбирать соответствующие режимы движения, чтобы не допустить возникновения данных происшествий.
Участки маршрута следования автомобилей между перекрестками можно дифференцировать по условиям движения на следующие составляющие:участки с двухсторонним движением; участки с односторонним движением.
Необходимость такого деления связана с тем, что улицы с односторонним движением облегчают перемещение транспортных потоков за счет того, что исключается влияние на условия движения встречных потоков транспорта, уменьшаются противоречия между интересами водителей и пешеходов. При этом более эффективно используются все полосы движения [14].
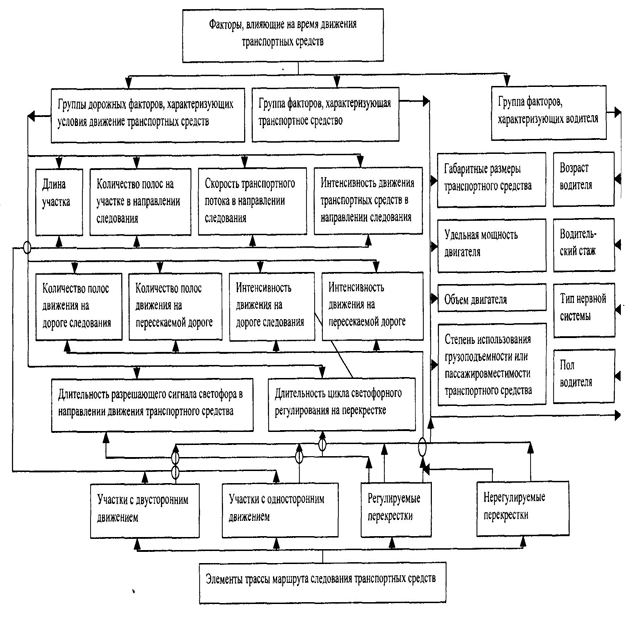
Рис Факторы, влияющие на время следования транспортных средств через соответствующие элементы трассы маршрута
Перекрестки улично-дорожной сети при исследовании времени движения автомобилей также целесообразно разбить на две группы:
- регулируемые перекрестки;
- нерегулируемые перекрестки.
На перекрестках данных видов существуют различные условия движения транспортных средств. Функционирующие технические средства регулирования дорожного движения определяют порядок движения транспортных средств, которые в свою очередь могут влиять на режим движения автомобиля. Кроме того, каждую из этих групп перекрестков необходимо разбить на подгруппы в зависимости от направления движения автомобиля:
- с движением прямо;
- с поворотом направо;
- с поворотом налево.
Необходимость создания этих подгрупп обосновывается тем, что в зависимости от направления движения автомобиля происходит различное количество ответвлений, слияний и пересечений транспортного потока, в котором он двигается, и конфликтующих транспортных потоков [14,15,16]. Наименьшие помехи для движения наблюдаются при ответвлениях. Они могут вызывать лишь некоторое снижение скорости движения автомобиля при выходе его из транспортного потока прямого направления. Значительно большие помехи возникают при слиянии транспортных потоков. Кроме замедления движения автомобиля появляется и опасность столкновения, что также накладывает определенный отпечаток на режим движения автомобилей. Наибольшие сложности связаны с пересечением, так как вероятность столкновения здесь наиболее значительна.
На следующем этапе возникает необходимость в выделении факторов различных групп, приведенных в зависимости 2.1, влияние которых на время движения автомобиля необходимо исследовать.
A.A. Френкель рекомендует при отборе включенных на рассмотрение факторов соблюдать следующие условия [17]:
- перечень охватываемых изучением факторов необходимо обосновать теоретически;
- перечень должен включать в себя важнейшие факторы, оказывающие наиболее существенное влияние на изменение объекта;
- перечень не следует делать слишком обширным, но он должен описывать функцию по возможности во всех аспектах;
- факторы не должны находиться между собой в функциональной связи, так как существование функциональной и близких к ней связей между факторами показывают, что они характеризуют одну и ту же сторону изучаемого явления. Включать в модель из двух связанных факторов нужно тот, который оказывает в уравнении регрессии наибольшее влияние;
- требуется установить область определения факторов;
- необходимо учитывать условия изменения факторов во времени.
С использованием этих рекомендаций были выбраны факторы, оказывающие наибольшее влияние на время движения автомобилей.
В качестве параметров, характеризующих автомобиль, можно выделить следующие:
- ширина автомобиля;
- удельная мощность двигателя;
- количество людей в салоне автомобиля.
Ширина автомобиля может влиять на возможность его маневрирования в транспортном потоке. Удельная мощность двигателя может выступать в качестве фактора, характеризующего динамические качества автомобиля [18,19]. Количество людей в салоне определяет полную массу автомобиля, что в свою очередь влияет на скорость его движения.
В качестве параметров, характеризующих водителя, можно принять:
- возраст водителя;
- водительский стаж.
Опыт и мастерство водителя так же влияют на скорость движения автомобилей [5]. В качестве показателей, оценивающих эти качества, можно использовать возраст водителя и его водительский стаж. Первый показатель может определять продолжительность фаз функционального состояния организма водителя, а второй — определяет уровень мастерства вождения.
Ряд факторов, характеризующих дорожные условия движения автомобилей, может быть общим для участков маршрута и перекрестков, а другие будут различные в виду особенностей движения на этих элементах трассы маршрута. К общим факторам можно отнести следующие:
- расстояние видимости дорожного покрытия;
- коэффициент сцепления колеса с дорогой.
Условия видимости, существенно влияющие на скорость движения [12,13], возможно оценить расстоянием видимости дорожного покрытия [18,19,20]. Коэффициент сцепления, определяемый типом и состоянием покрытия дороги, также существенно влияет на скорость движения автомобилей [5,9].
К факторам, характеризующим дорожные условия движения автомобилей на участке маршрута, можно отнести:
- длину участка;
- количество полос движения в направлении следования;
- скорость транспортного потока в направлении следования;
- интенсивность движения транспортных средств в направлении следования.
Длина участка маршрута между перекрестками определяет тот промежуток времени, в течение которого автомобиль сможет двигаться с максимально возможной скоростью. Количество полос движения может определять возможность маневрирования автомобиля в потоке транспортных средств. Скорость транспортного потока в направлении движения является интегральным показателем. На ее значение влияет состав транспортного потока, тип и состояние покрытия дороги, степень ровности и продольный профиль дороги, план трассы [11]. Скорость транспортного потока и интенсивность движения транспортных средств на участке может определять возможность возникновения помех движению автомобиля со стороны других транспортных средств.
Для перекрестков можно выделить следующие факторы, характеризующие условия движения:
- количество полос движения на основной дороге;
- количество полос движения на пересекаемой дороге;
- интенсивность движения на основной дороге;
- интенсивность движения на пересекаемой дороге.
Количество полос движения на основной и пересекаемой дороге определяют геометрические размеры перекрестка, которые также влияют на возможность маневрирования при движении на перекрестке. Интенсивность движения на перекрестке, как и в случае участка маршрута, может определять возможность возникновения помех движению автомобиля.
Для регулируемых перекрестков дополнительно целесообразно выделить еще два фактора:
- длительность цикла светофорного регулирования;
- длительность зеленого сигнала светофора в направлении движения автомобиля.
Данные факторы могут определять вероятность преследования автомобиля через перекресток на разрешающий сигнал светофора. Все факторы, рассмотренные ранее и принятые для исследования, составляют только часть группы дорожных факторов. Оставшуюся часть факторов конкретизировать достаточно сложно ввиду случайности их возникновения. Это транспортные "пробки", пешеходные переходы, трамвайные остановки и другие случайно возникающие помехи. Данные факторы будут определять закон распределения фактической скорости движения автомобиля на участке маршрута и перекрестке [11]. Вследствие этого, возникает необходимость в определении законов распределения фактических скоростей движения автомобилей на элементах трассы маршрута.
Экспериментальные исследования проводились в городах Харьков, Луганск, Одесса. Водителю исследуемого автомобиля ставилась задача проехать между двумя пунктами в городе. Перед началом движения в учетной карточки фиксировались параметры водителя и транспортного средства. При движении автомобиля с использованием диктофона голосом на магнитной ленте фиксировался ряд параметров. Для каждого участка маршрута следования между перекрестками:
- момент времени въезда на участок (пересечение створа предыдущего перекрестка);
- наименование улицы или ориентира на пути следования;
- тип и состояние покрытия;
- расстояние видимости дорожного покрытия;
- момент времени выезда с участка (пересечение створа последующего перекрестка).
Для каждого перекрестка маршрута:
- момент времени выезда на перекресток (пересечение его створа);
- характер движения (прямо, направо, налево);
- тип и состояние покрытия;
- расстояние видимости;
- момент времени выезда с перекрестка (пересечение его створа).
После прибытия в конечный пункт маршрута в карточке обследования фиксировалось время прибытия, наименование объекта и показание спидометра при прибытии.
Для каждого участка и перекрестка маршрута определялись параметры, характеризующие дорожные условия движения Для определения интенсивности движения транспортных средств использовались данные Управления ГАИ МВД Украины, кафедры транспортных систем Харьковского национального автомобильно-дорожного университета, а также собственные исследования, выполненные по ранее опубликованной методике [1]. Таким образом, после обработки результатов обследования были получены данные о времени проследования каждого участка маршрута, каждого перекрестка и условия движения по ним.
С использованием полученных результатов можно разработать модели изменения времени движения автомобилей по участкам маршрута и пересечения перекрестков, что в свою очередь позволит провести моделирование процесса следования автомобилей между районами города и определить функцию выбора водителями пути следования.
4.3. Определение законов распределения параметров движения автомобилей
Для оценки влияния на скорость движения автомобилей случайных факторов, не фиксируемых в процессе обследования, возникает необходимость в определении законов распределения фактической скорости движения на элементах маршрута. Однако, по данным результатам обследования, возможно определение скорости движения автомобилей только на участках маршрута между перекрестками, так как имеется информация о длинах участков и времени движения на них. Для перекрестков однозначное определение скорости движения представляет собой существенную трудность. Это связано с тем что при движении через перекресток сложно определить траекторию движения, которая может быть различной вследствие влияния транспортных потоков конфликтующих направлений.
В связи с этим при проведении исследований для участков маршрута определились законы распределения скорости движения и ее среднеквадратического отклонения, а для перекрестков времени движения.
Для исключения влияния факторов, фиксируемых в процессе обследования, законы распределения определялись с учетом марки транспортного средства, расстояния видимости дорожного покрытия, коэффициента сцепления, интенсивности движения транспорта.
Одной из задач математической статистики является использование свойств некоторого ограниченного подмножества объектов, взятого из совокупности, для суждения о неизвестных свойствах ее остальных объектов [21]. Для этого необходимо обоснование размеров выборки. Для определения размера выборки в настоящее время не существует единого подхода. Разные исследователи предлагают определять данную величину по-разному. Если размер генеральной совокупности относительно небольшой, то возможно определить ее среднеквадратическое отклонение и по определенной формуле определить размер выборки [21]. Возможно также определение размера выборки на основании таблицы достаточно больших чисел [22]. Предполагается, что необходимо иметь представление о доле данного значения изучаемого свойства в генеральной совокупности на основании доли этого значения в частичной совокупности (выборке), чтобы с определенной "степенью уверенности" можно было бы считать, что отклонение неизвестной доли от частоты не превышает некоторой допустимой ошибки. Таблица показывает, как достаточно большое число наблюдений, объем выборки, зависит от "степени уверенности, величины допустимой ошибки и самой неизвестной доли. Зависимость от неизвестной доли исключается, выбирая для нее наихудшее значение. Поэтому достаточно большое число получается завышенным.
"Степень вероятности" определяется величиной вероятности Р, с которой делается соответствующее исследуемой задаче заключение. В практике научных исследований обычно принимается Р = 0,95, Допустимая ошибка при исследованиях принимается равной 0,05. При этих значениях Р и е
достаточно большое число наблюдений равно 384 [22]. При определении законов распределения количество опытов определялось по номограмме достаточно больших чисел на основании допустимой ошибки е = 0,05 и меры изменчивости (коэффициента вариации) скорости движения на участке, ее среднеквадратического отклонения и времени проследования перекрестков [22]
Согласованность эмпирическою и теоретически! и ран оценивалась по критерию согласия Пирсона для доверительной вероятности Р = 0,95 и допустимой ошибки е — 0,05 [22]. Результаты расчета, приведенные в табл. 2.1-2.10, показали, что на участках маршрута колебания фактической скорости движения автомобилей, ее среднеквадратического отклонения возможно описать нормальным законом распределения. Аналогичным законом распределения возможно описать и колебания времени движения через перекрестки.
4.4. Анализ зависимости параметров движения автомобилей от условий их движения
На основании информации, полученной при проведении обследования параметров движения легковых автомобилей, представляется возможным математическое описание зависимости между параметрами и условиями движения.
На первом этапе исследования был проведен анализ влияния каждого из ранее определенных факторов на параметры движения. Это необходимо для того, чтобы выявить закономерности влияния отдельных факторов. Полученные закономерности могут быть использованы при разработке многофакторных моделей изменения параметров движения автомобилей.
4.4.1. Математическое описание изменения скорости движения
автомобилей на участках маршрута в зависимости от условий движения
В качестве решения задачи математического описания изменения скорости движения были выбраны методы корреляционного и регрессионного анализа [21]. Для описания закономерностей изменения скорости движения была выбрана модель линейного типа. Размер выборки при разработке регрессионных моделей определялся в соответствии с рекомендациями, по которым число наблюдений должно быть в 6-7 раз больше числа включаемых в модель факторов [23]. Для вычисления коэффициентов регрессии использовался метод наименьших квадратов [21-27]. Характеристики параметров модели определялись по известным методам статистики [21-28]. Для вычисления значимости факторов, входящих в модель, использовался критерий Стьюдента [23,24, 29, 30]. Информационная способность модели определяется критерием Фишера. Теснота связи между зависимой переменной и факторами, влияющими на ее уровень, определяется коэффициентом множественной корреляции [17, 23, 27, 28]. Чем ближе данный коэффициент к единице, тем теснее связь между изучаемым показателем и факторами, влияющими на ее уровень. Влияние неучтенных факторов оценивалось коэффициентом детерминации.
Характеристики разработанных моделей изменения скорости движения на участках с двухсторонним движением транспорта V2
и односторонним V1
приведены в таблице 4.11.
Таблица 4.11 Характеристика моделей изменения скорости движения автомобиля на участках маршрута
| Фактор |
Модель |
Коэф-фици-ент кор-реля-ции |
Коэф-фици-ент детер-мина-ции |
Критерий Фишера |
| рас-чет-ный |
таб-лич-ний |
| Интенсивность движения, N,прив.авт./ч. |
V2
=36,7+0,007N
V1
=29,8+0,009N
|
0,37
0,24
|
0,14
0,06
|
11,7
1,92
|
1,39
1,39
|
| Количество полос в направлении движения ,К ед. |
V2
=34,4+4,6K
V1
=24,9+7,5K
|
0,35
0,36
|
0,12
0,13
|
10,4
4,2
|
1,39
1,39
|
| Длина участка ,L, км |
V1
=33,7+9,4L
V2
=22,5+31L
|
0,42
0,57
|
0,18
0,33
|
15,9
25,4
|
1,39
1,39
|
| Скорость транспортного потока,V,км/ч. |
V1
=26,7+0,41V
V2
=4,7+0,76V
|
0,51
0,67
|
0,26
0,45
|
26,8
42,9
|
1,39
1,39
|
| Коэффициент сцепления колеса автомобиля с дорожным покрытием, Кс |
V1
=26,2+19,3Kc
V2
=18,2+21,1Kc
|
0,22
0,39
|
0,05
0,15
|
6,62
8,99
|
1,39
1,39
|
| Расстояние видимости дорожного покрытия, Rв
,м |
V1
=33+0,04Rв
V2
=25,6+0,04Rв
|
0,08
0,1
|
0,006
0,01
|
0,69
0,66
|
1,39
1,39
|
| Обьем двигателя, Q,см3
|
V1
=28,5+0,007Q
V2
=23,1+0,005Q
|
0,1
0,1
|
0,01
0,01
|
1,33
0,49
|
1,39
1,39
|
| Удельная мощность двигателя, Uм
л.с/т |
V1
=16,4+0,5Uм
V2
=27,1+0,12Uм
|
0,2
0,1
|
0,04
0,01
|
3,93
0,43
|
1,39
1,39
|
| Ширина автомобиля, H, м |
V1
=-134+106,9H
V2
=4+9,9H
|
0,24
0,17
|
0,06
0,03
|
7,7
0,3
|
1,39
1,39
|
| Возраст водителя, Вв
лет |
V1
=56,9-0,67 Вв
V2
=50,8-0,8319Вв
|
0,22
0,33
|
0,07
0,11
|
5,8
6,88
|
1,39
1,39
|
| Водительский стаж , Св
,лет |
V1
=34,9+0,7Св
V2
=26,7+0,5Св
|
0,26
0,14
|
0,07
0,02
|
7,74
0,56
|
1,39
1,39
|
Модели, приведенные в табл. 4.11, обладают достаточно высокой информационной способностью, о чем свидетельствует превышение расчетного значения критерия Фишера над табличным. Исключением являются модели, независимой переменной, в которых выступают Rв
, Q,U,Н, Св
. Для моделей изменения V2
в зависимости от V и V1
в зависимости от L, V наблюдается заметная степень корреляции между зависимой и независимой переменными. Для моделей изменения V2
в зависимости от N, К, L и V1
в зависимости от К, Кс
наблюдается умеренная степень корреляции между зависимой и независимой переменными Для остальных моделей степень корреляции слабая. Значение коэффициента детерминации всех моделей показывает, что на значение V2
и V1
, большое влияние оказывают факторы, не учтенные в данных моделях.
Анализ полученных моделей позволяет сделать следующие выводы. Скорость движения автомобилей увеличивается с увеличением интенсивности движения. Однако данные зависимости получены без учета ширины проезжей части участка движения. Показателем, с использованием которого можно оценить ширину проезжей части, является количество полос в направлении следования автомобиля.
Результаты обследования позволили описать зависимость между интенсивностью движения и количеством полос для участков с двухсторонним движением:
N = 348,8 К (4.4)
и для участков с односторонним движением:
N = 322,5 К. (4.5)
Коэффициенты корреляции моделей составили 0,85 и 0,91 соответственно. Это говорит о высокой степени корреляции между зависимой и независимой переменными моделей.
Увеличение количества полос обуславливает увеличение интенсивности движения. Вследствие этого при разработке математического описания зависимости изменения скорости движения целесообразно учитывать взаимосвязь между количеством полос и интенсивностью движения.
С увеличением количества полос увеличивается и скорость движения. Это обуславливается улучшением условий для движения и маневров автомобилей.
Длина участка увеличивает скорость движения. Она определяет то время, которое автомобиль может двигаться с максимальной скоростью. Чем больше длина участка, тем меньше удельный вес затрат времени на разгон и торможение автомобиля до и после перекрестка.
Скорость транспортного потока на участке увеличивает скорость движения автомобиля. Двигаясь в потоке транспортных средств, водитель вынужден приспосабливаться к параметрам потока.
Увеличение коэффициента сцепления колеса автомобиля с дорожным покрытием увеличивает скорость движения. Это объясняется тем, что с увеличением коэффициента сцепления движение становится более стабильным, отпадает потребность в дополнительных мерах безопасности, и водитель может выбрать более скоростной режим движения.
Расстояние видимости дорожного покрытия увеличивает значение зависимой переменной. Чем лучше условия видимости, тем более скоростной режим движения может выбирать водитель, так как при этому него есть возможность заранее оценить дорожную обстановку и принять необходимое решение по управлению автомобилем.
Объем двигателя положительно влияет на скорость движения. Это можно объяснить условиями движения автомобилей на участках данных типов. При движении на участках есть возможность обгона. Этим и пользуются водители автомобилей с более мощным двигателем. Аналогичная картина наблюдается при анализе зависимости скорости движения от удельной мощности двигателя автомобиля. Чем больше удельная мощность, тем легче произвести разгон автомобиля [18].
При увеличении ширины автомобиля скорость движения увеличивается. Это обуславливается зависимостью между шириной автомобиля и мощностью двигателя, которая была определена по результатам обследования:
UM=31,3H,  (4.6) (4.6)
где UM—
удельная мощность двигателя автомобиля, л.с./т.
Коэффициент корреляции модели 2.4 составил 0,98, что говорит о высокой степени зависимости между шириной автомобиля и удельной мощностью его двигателя. Удельная мощность двигателя автомобиля увеличивает скорость движения. Это происходит вследствие того, что с ее увеличением улучшаются динамические качества транспортного средства.
Возраст водителя отрицательно влияет на скорость движения. С увеличением возраста водитель начинает выбирать более безопасные режимы движения.
Стаж вождения водителя, наоборот, увеличивает скорость движения. С увеличением стажа возрастает мастерство вождения, водитель может выбирать более скоростные режимы движения.
Модели, приведенные в табл. 4.11, отражают тенденцию влияния параметров движения, транспортного средства и водителя на скорость движения. Однако использовать данные модели при решении задачи определения времени движения автомобилей не представляется возможным вследствие недостаточно больших коэффициентов корреляции. Данные модели описывают зависимость скорости движения от одного фактора. В действительности эти факторы оказывают совместное влияние на скорость. Описать изменение данного показателя в зависимости от параметров движения, транспортных средств и водителя возможно с использованием метода множественной корреляции.
4.7.1. Модели изменения времени движения легковых автомобилей через регулированные перекрестки на маршруте следования
4.7.1.1.Модель изменения времени проследования регулируемых перекрестков с движением прямо
Расчет параметров модели изменения времени движения легковых автомобилей через регулированный перекресток с проездом прямо проводится в порядке, описанном в подразделе 4.4.1. Результаты расчетов приведены в таблицах 4.24-4.25.
Модель изменения времени движения легковых автомобилей через регулированный перекресток с проездом прямо имеет такой вид:
 (4.11) (4.11)
Таблица
Характеристики модели изменения времени движения легковых автомобилей через регулируемый перекресток с проездом прямо при 24 опытах
| Факторы |
Обозна-чения,
Размер-ность
|
Гра-ницы изме-рения |
Коэф-фициент |
Стан-дартная ошибка |
Критерий Стьюдента |
| расчетный |
табличный |
| Количество полос движения на пересекаемой дороге |
Кп
,ед. |
1-6 |
0,99 |
0,09 |
11,38 |
2,07 |
| Возраст водителя |
Вв
,лет |
20-40 |
0,61 |
0,01 |
5,03 |
2,07 |
Доверительные интервалы коэффициентов модели
| Факторы |
Нижняя граница |
Верхняя граница |
| Количество полос движения на пересекающейся дороге |
0,81 |
1,17 |
| Возраст водителя |
0,04 |
0,09 |
Из всех факторов значимыми оказались только два, о чем свидетельствует расчетное значение критерия Стьюдента и граница доверительных интервалов коэффициентов модели.
Анализируя модель (4.11), можно сделать вывод, что количество полос движения на пересекаемой дороге увеличивает время движения автомобиля через перекресток. Этот параметр определяет геометрические размеры перекрестка, и с увеличением количества полос движения на пересекающейся дороге увеличивается расстояние, которое автомобиль должен преодолеть при проследовании перекрестка.
С увеличением возраста связано изменение остроты и точности реакции, темперамента, опыта и психофизиологических качеств водителя, поэтому он выбирает наиболее безопасные режимы движения через перекресток, которые приводят к увеличению времени движения через него.
Статистическая оценка показателей модели (4.11) происходила аналогично тому, как это было сделано в подпункте 4.4.1. Результаты расчетов приведены в таблице 4.26.
Таблица Результаты оценки модели изменения времени движения легковых автомобилей через регулированный перекресток с проездом прямо
| Показатели |
Значение |
Критерий Фишера: табличный
расчетный
|
2,05
686,02
|
| Коэффициент множественной корреляции |
0,99 |
| Средняя оценка аппроксимации |
10,6 |
В результате проведения оценочных расчетов можно сделать вывод о допустимости использования регрессионной модели изменения времени движения легковых автомобилей через регулированный перекресток с проездом прямо в имитационной модели движения легковых автомобилей по маршруту следования.
Список использованных источников
1. Хомяк Я. В. Организация дорожного движения. — К.: Вища школа, 1986. — 271 с.
2. Ефремов И.С, Кобозев В.М., Юдин В.А. Теория городских пассажирских перевозок: —М: Высшая школа. 1980. — 535 с.
3. П.Иванов В.Н. Системный подход к оценке обеспечения безопасности движения на автомобильных дорогах / Труды МАДИ. — Вып. 33. — М., 1972. — С. 4-10.
4. Иносэ X., Хам ада Т. Управление дорожным движением / Под ред. М.Я. Блин-кииа; Пер с англ. — М.: Транспорт, 1983. — 248 с.
5. Воркут А.И. Грузовые автомобильные перевозки. — К.: Вища школа. 1986. — 447 с.
6. Коноплянко В.И. Организация и безопасность дорожного движения. — М.: Транспорт, 1991. — 183 с.
7. Грузовые автомобильные перевозки. Учебник для учащихся техникумов. Изд. 2-е перераб. и доп./Под общ. ред. М.И. Раффа. — К.: Вища школа, 1975. — 288 с.
8. Лесов Ю.И., Иткинд И.И. Автомобильные перевозки промышленных и продовольственных товаров. —2-е изд. доп. — М.: Транспорт, 1968. — 216 с.
9. Говорущенко М.Я. Основы теории эксплуатации автомобилей. — К.: Вища школа, 1977. — 232 с.
10. Шкарин С.Г. Оценка и классификация внешних воздействующих факторов при исследовании и нормировании эксплуатационных качеств автомобилей: Автореф. дис. ... канд. техн. наук/05.05.03/ Волгогр. политехи, ин-т. — Волгоград. 1988. — 20 с.
11. Давидич Ю.А. Разработка мероприятий по сокращению времени ожидания пассажирами городских маршрутных автобусов: Дис... канд. техн. наук: 05.22.01. — Харьков, 1993. — 180 с.
12. Бабков В.Ф. Дорожные условия и безопасность движения. — М.: Транспорт, 1982. —288с.
13. Герасименко П.А.Т Колчинский Ю.И. Правила дорожного движения. — Харьков: НПП Светофор, 1996. — 47 с.
14. Самойлов Д.С., Юдин В.А. Организация и безопасность городского движения. — М: Высшая школа, 1972. — 265 с.
15. Клипковштейн Г.И. Организация дорожного движения. — М.: Транспорт, 1981. —240 с.
16. Френкель A.A. Многофакторные корреляционные модели производительности труда. — М.: Экономика, 1966. — 96 с.
17. Бортнинский П.И., Задорожный В.И. Тягово-скоростные качества автомобилей. — К.: Вища школа, 1978. — 176 с.
18. Скотников В.А., Мащенкий A.A., Солонисий A.C. Основы теории и расчета трактора и автомобиля. — М.: Агропромиздат, 1986. — 183 с.
19. Фолькевич Б.С. Теория автомобиля. — М: Высшая школа, 1963. — 239 с.
20. Галушко В.Г. Вероятностно-статистические методы на автотранспорте. — К.: Вища школа. 1976. — 232 с.
21. Митропольский А.К. Техника статистических вычислении. — М.: Наука, 1971. —576 с.
22. Завадский Ю.В. Решение задач автомобильного транспорта и дорожно-строительных машин с помощью регрессионного анализа. — М.: МАДИ, 1981.—11с.
23. Займенко Ю.П., Шумилова СЛ. Исследование операций. — К.:Вища школа, 1984. — 267 с.
24. Вознесенский В.Л. Статистические методы планирования эксперимента в технико-экономических исследованиях. — М.: Финансы и статистика, 1981. — 264 с.
25. Завадский Ю.В. Планирование эксперимента в задачах автомобильного транспорта. — М.: Транспорт, 1978. — 158 с.
26. Афифи А., Эйзен С. Статистический анализ. — М.: Мир, 1982. — 488 с.
27. Драйпер Н., Смит Г. Прикладной регрессионный анализ. — М.гСтатистика, 1973. — 392 с.
28. Гутер P.C., Овчинский Б.В. Элементы численного анализа и математической обработки результатов опыта. — М.: Наука, 1970. — 432 с.
29. Налимов В.В.. Чернова H.A. Статистические методы планирования экстремальных экспериментов, — М.: Наука, 1985. — 340 с.
30. Лобанов Е.М. Транспортная планировка городов. — М.: Транспорт, 1990. — 311с.
|