1. Задание 1 СТАТИКА. Для одного из заданных положений плоского механизма составить уравнения и определить величину и направление технологической силы Qm
, удерживающую механизм в равновесии при действии на звенья сил тяжестей и уравновешивающего момента Mур
=0,8 Нм, приложенного к ведущему звену AB.
2. Задание 2 КИНЕМАТИКА. Для заданных положений ведущего звена построить планы скоростей и ускорений (при w1
=50 ед/с), и определить величину и направление линейных скорости и ускорения т.С.
3. Задание 3 ДИНАМИКА. Для одного из заданных положений механизма ABCD, при действии на ведущее звено ABвнешнего момента Мдв
= 0,8 Н∙м и технологической силы Qт
, действующей на звено CDв точке К, методом КИНЕТОСТАТИКИ определить значения реакций в опорах (точки А и D), приняв ω1
= 50 рад/сек. Написать уравнение для определения кинетической энергии системы. Значения сил тяжести принять равным: Р1
= 0,5 Н, Р2
= 1,5 Н, Р3
= 0,7 Н. Длины звеньев механизма измерить на рисунке.
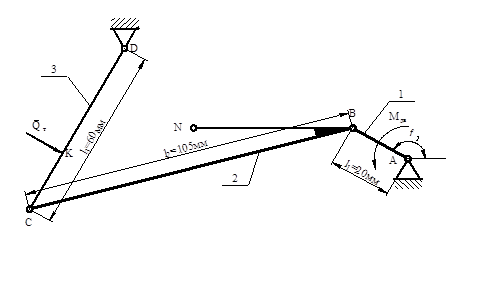
Рисунок 1. Исходные данные.
1.
Задание 1. СТАТИКА
Напишем условия равновесия для положения механической системы с учетом сил тяжестей звеньев, уравновешивающего момента Mур
равного движущему моменту Mдв
, показанной на рисунке 2. Данная схема представляет собой систему тел. Для решения данной задачи необходимо расчленить систему на стержни, а действие утраченных связей заменить реакциями (внутренними силами).

Рисунок 2. Схема с указанием сил тяжести.
Изобразим силы тяжести звеньев, силы реакции опор.
Равновесие звена DC
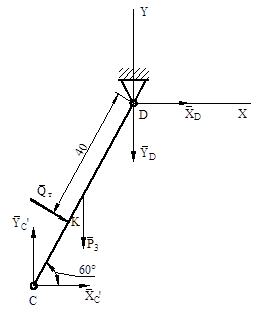
Рисунок 3. Равновесие звена DC.
Запишем уравнения статики для звена DC. Для этого выберем положение начала координат для данного звена в точке D.



Равновесие звена NBC
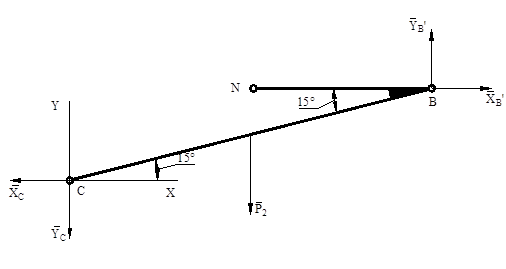
Рисунок 4. Равновесие звена NBC
Запишем уравнения статики для звена NBC. Для этого выберем положение начала координат для данного звена в точке C.



Равновесие звена AB
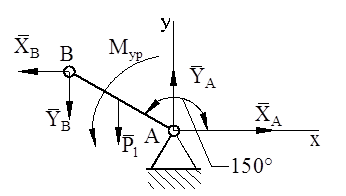
Рисунок 5. Равновесие звена AB.
Запишем уравнения статики для звена NBC. Для этого выберем положение начала координат для данного звена в точке А.



Для нахождения технологической силы  воспользуемся уравнением : воспользуемся уравнением :

Так как  , а также , а также  , то выражение принимает вид: , то выражение принимает вид:
 . .
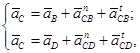
Таким образом, осталось определить значения  и и  . Значения этих реакций связи определим из уравнений , , : . Значения этих реакций связи определим из уравнений , , :



Так как  , а также , а также  , то: , то:


Формула принимает следующий вид:
 . .
Теперь необходимо совместно решить систему уравнений, состоящую из уравнений и .

Перепишем каждое уравнение относительно и :

Подставим значения длин звеньев, сил тяжести и уравновешивающего момента.
В результате решения данной системы получаем следующие значения:
= 55,1 Н;
= -16,4 Н.
При подстановке полученных значений реакций связи в уравнение , получим значение технологической силы:
= 58,9 Н.
Задание 2. КИНЕМАТИКА
Построение плана скоростей. Определяем виды относительного движения звеньев: звенья 1 и 3 совершают вращательное движение, а звено 2 – плоско-параллельное.
Линейную скорость точки B звена 1 определяем по формуле :
 , ,
где  – угловая скорость звена 1, с-1
. – угловая скорость звена 1, с-1
.
 = 1 м/с. = 1 м/с.
Необходимо построить планы скоростей и ускорений для трёх положений звеньев механизма. Первое из положений показано на рисунке 1, при котором угол φ1
= 150º.
На плане скоростей при φ1
= 150º (рисунок 6) скорость VB
изображается отрезком pV
b. Зададимся величиной этого отрезка  мм и определим масштабный коэффициент плана скоростей: мм и определим масштабный коэффициент плана скоростей:

 = 0,05 = 0,05  . .
Скорость точки C определяется из векторной системы уравнений:
где  - векторы абсолютных скоростей точек; - векторы абсолютных скоростей точек;  - векторы относительных скоростей (скорость точки С вокруг B и скорость точки С вокруг опоры D). - векторы относительных скоростей (скорость точки С вокруг B и скорость точки С вокруг опоры D).
Система уравнений решается графическим способом. При этом учитывается, что  , ,  . Скорость точки в равна нулю . Скорость точки в равна нулю  (на плане скорость совпала с полюсом pV
). (на плане скорость совпала с полюсом pV
).
Выполним построения для нахождения точки C:
1) Построим скорость  , т.е. скорость точки С вокруг точки в – проведем на плане направление вектора , т.е. скорость точки С вокруг точки в – проведем на плане направление вектора  . Из полюса pV
проведем линию перпендикулярно звену CD. . Из полюса pV
проведем линию перпендикулярно звену CD.
2) Построим скорость  , т.е. скорость точки С вокруг точки B – проведем на плане направление вектора , т.е. скорость точки С вокруг точки B – проведем на плане направление вектора  через точку b плана скоростей. через точку b плана скоростей.
3) Точка плана скоростей лежит на пересечении двух направлений и  . Достраиваем вектор - скорость точки С. . Достраиваем вектор - скорость точки С.
4) Находим величину скорости точки С из плана скоростей:

где - длина вектора на плане скоростей, мм.
Для плана механизма с φ1
= 150º:
 = 1,25 м/с. = 1,25 м/с.

 = 1,8 м/с. = 1,8 м/с.
 = 17 с-1
. = 17 с-1
.
 = 21 с-1
. = 21 с-1
.
Для плана механизма с φ1
= 180º:
 = 0,4 м/с. = 0,4 м/с.
 = 1,35 м/с. = 1,35 м/с.
 = 13 с-1
. = 13 с-1
.
 = 7 с-1
. = 7 с-1
.
Для плана механизма с φ1
= 210º:
 = 0,5 м/с. = 0,5 м/с.
 = 0,65 м/с. = 0,65 м/с.
 = 6 с-1
. = 6 с-1
.
 = 8 с-1
. = 8 с-1
.
Построение плана ускорений. Ускорение точки B звена 1, совершающего вращательное движение, определяем по формуле

 = 50 м/с2
. = 50 м/с2
.
Выбираем на плоскости точку pa
– полюс плана ускорений. Задаемся величиной отрезка pa
b = 50 мм, изображающего на плане ускорений нормальную составляющую, и определим масштаб плана ускорений
 = 1 . = 1 .
Ускорение точки C определяется из векторных уравнений:
где  – векторы абсолютных ускорений точек, причем – векторы абсолютных ускорений точек, причем  ; ;
 – векторы нормальных ускорений; – векторы нормальных ускорений;
 – векторы тангенциальных ускорений. – векторы тангенциальных ускорений.
Построение плана ускорений для плана механизма с φ1
= 150º (рисунок 6):
Определим значения и длины отрезков нормальных ускорений:

 = 31 м/с2
. = 31 м/с2
.
в масштабе плана ускорений:

 = 31 мм. = 31 мм.

 = 26 м/с2
. = 26 м/с2
.
в масштабе плана ускорений:

 = 26 мм. = 26 мм.
Построение плана ускорений для плана механизма с φ1
= 180º (рисунок 7):
Определим значения и длины отрезков нормальных ускорений:
 = 17 м/с2
. = 17 м/с2
.
в масштабе плана ускорений:
 = 17 мм. = 17 мм.
 = 3 м/с2
. = 3 м/с2
.
в масштабе плана ускорений:

 = 3 мм. = 3 мм.
Построение плана ускорений для плана механизма с φ1
= 210º (рисунок 8):
Определим значения и длины отрезков нормальных ускорений:
 = 4 м/с2
. = 4 м/с2
.
в масштабе плана ускорений:
 = 4 мм. = 4 мм.
 = 4 м/с2
. = 4 м/с2
.
в масштабе плана ускорений:
 = 4 мм. = 4 мм.
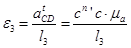
Угловые ускорения звеньев 2 и 3 определяем по формулам:
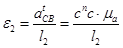 ; ;
Угловые ускорения для плана механизма с φ1
= 150º:
 = 57 с-2
; = 57 с-2
;
 = 1117 c-2
. = 1117 c-2
.
Угловые ускорения для плана механизма с φ1
= 180º:
 = 400 с-2
; = 400 с-2
;
 = 1400 c-2
. = 1400 c-2
.
Угловые ускорения для плана механизма с φ1
= 210º:
 = 457 с-2
; = 457 с-2
;
 = 933 c-2
. = 933 c-2
.
Выполним построения для нахождения точки C (рисунки 6, 7, 8):
1) Для этого из точки b плана ускорений откладываем параллельно звену BC отрезок  (нормальное направление ускорения) по направлению в сторону движения от точки С к точке В. Перпендикулярно BC проводим через конец этого отрезка линию - тангенциальное направление ускорения. (нормальное направление ускорения) по направлению в сторону движения от точки С к точке В. Перпендикулярно BC проводим через конец этого отрезка линию - тангенциальное направление ускорения.
2) Из полюса pa
плана ускорений откладываем параллельно звену CD отрезок  (нормальное направление ускорения) по направлению в сторону движения от точки С к точке D. Перпендикулярно CD проводим через конец этого отрезка линию - тангенциальное направление ускорения. (нормальное направление ускорения) по направлению в сторону движения от точки С к точке D. Перпендикулярно CD проводим через конец этого отрезка линию - тангенциальное направление ускорения.
3) Пересечением 2-линий тангенциальных направлений получится точка C – вектор  . .
4) Находим величину ускорения точки С из плана ускорений:
· Для плана механизма с φ1
= 150º:
 = 73 м/с2
; = 73 м/с2
;
· Для плана механизма с φ1
= 180º:
 = 84 м/с2
; = 84 м/с2
;
· Для плана механизма с φ1
= 210º:
 = 57м/с2
; = 57м/с2
;
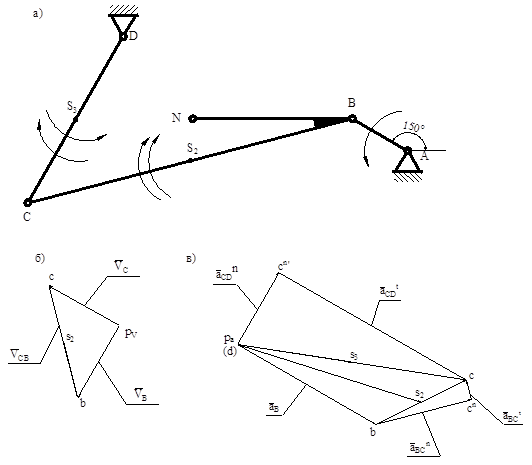 Рисунок 6. План механизма (а), скоростей (б) и ускорений (в) при φ1
= 150º.
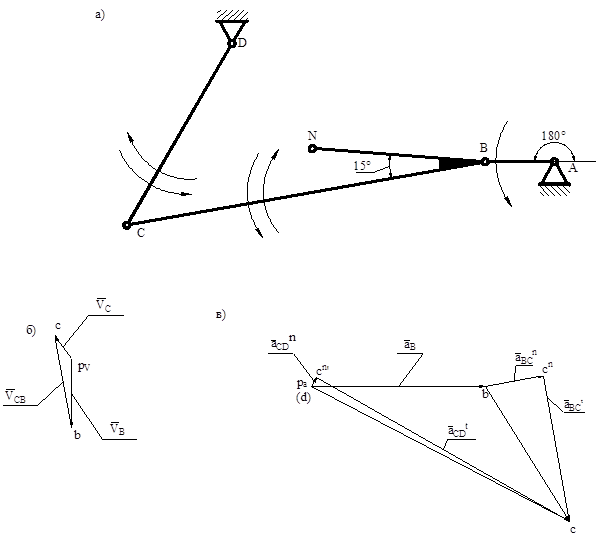 Рисунок 7. План механизма (а), скоростей (б) и ускорений (в) при φ1
= 180º.
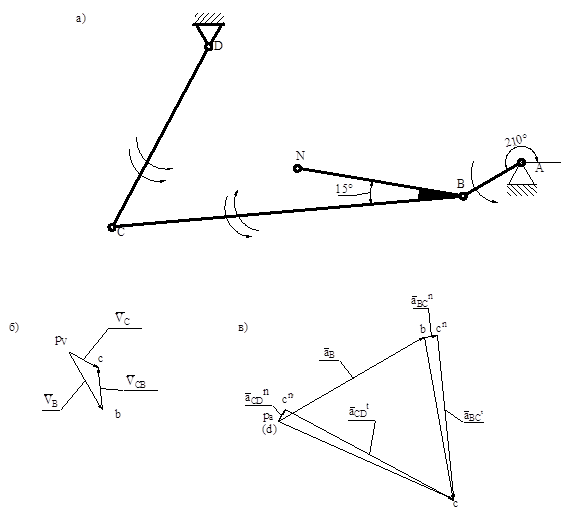 Рисунок 8. План механизма (а), скоростей (б) и ускорений (в) при φ1
= 210º.
Построение траекторию движения точки N. Для этого построим планы механизма для 12-ти положений: φ1
= 30, 60, 90, 120, 150, 180, 210, 240, 270, 300, 330, 360.
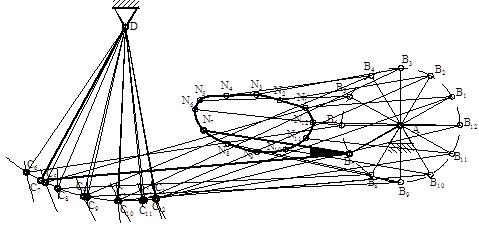
Рисунок 9. Построение планов механизма для 12-ти положений.
Построение планов механизма будем производить методом засечек:
· Определим траекторию движения точки B путём построения с помощью циркуля окружности с центром A радиусом, равным l1
;
· Далее с помощью циркуля построим дугу траектории движения точки C. Затем для каждого положения точки B с помощью циркуля проведём засечки на дуге, определяющей траекторию движения точки C, радиусом l2
. На пересечении засечек с дугой, определяющей траекторию движения точки C, будут определены положения точки C;
· Далее для каждого положения точки B с помощью циркуля проводим дугу радиусом 50 мм, проводим прямую через точку B, составляющую со звеном CB угол 15º. На пересечении полученной дуги с прямой получим точку N;
· Далее соединим все полученные положения точки N таким образом получив траекторию движения точки N.
Задание 3. ДИНАМИКА
Значения реакций в опорах определим для положения механизма φ1
= 150º, изображённого на рисунке 10
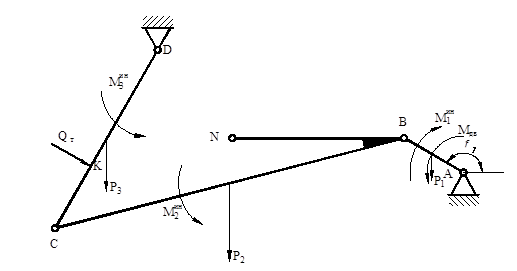
Рисунок 10. Положение механизма при φ1
= 150º
Изобразим активные силы и силы инерции, действующие на систему (рисунок 10).
Чтобы найти реакции звеньев 1 и 3 последовательно рассмотрим "равновесие" двух кинематических групп.
Расчёт звеньев 2-3.
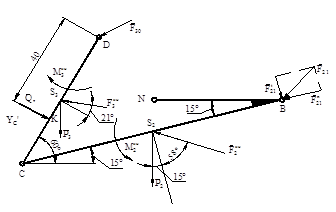
Рисунок 11. "Равновесие" кинематической группы 2-3.
Вначале рассмотрим звено 2:

 . .
 0,008 Н∙м. 0,008 Н∙м.
Направлен момент инерции в сторону, противоположную угловому ускорению.
Определим из уравнения статики  : :

 = 9,2 Н. = 9,2 Н.
Направлена сила инерции в сторону, противоположную ускорению центра масс системы.
 = 1,8 Н. = 1,8 Н.
Согласно измерениям на рисунке 6 и значению  : :
 60 м/с2
. 60 м/с2
.
Рассмотрим сумму моментов для группы звеньев 2-3 относительно точки D:



Определим из уравнения статики  : :


 = 0,03 Н∙м. = 0,03 Н∙м.

 = 3,7 Н. = 3,7 Н.
Согласно измерениям на рисунке 6 и значению :
 36 м/с2
. 36 м/с2
.
  = 40,6 Н. = 40,6 Н.
Полная реакция в паре B равна:
 = 40,6 Н. = 40,6 Н.
Векторное уравнение сил для группы 2-3 позволяет графически определить вектор  по величине и направлению (рисунок 12). по величине и направлению (рисунок 12).


Строим план сил в масштабе
 = 0,5 Н/мм. = 0,5 Н/мм.
Найдем величины отрезков, изображающих на плане сил векторы сил:
 = 2 мм; = 2 мм;
 = 118 мм; = 118 мм;
 = 3 мм; = 3 мм;
 = 18 мм; = 18 мм;
 = 4 мм; = 4 мм;
 = 81 мм; = 81 мм;
Из плана сил определяем
 = 41 Н. = 41 Н.
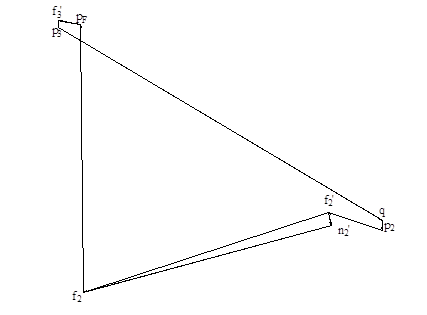
Рисунок 12. План сил для определения .
Расчёт начального звена 1.
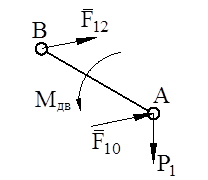
Рисунок 13. "Равновесие" начального звена 1
Из векторного уравнения сил для звена 1 графически определяем вектор  по величине и направлению: по величине и направлению:


Строим план сил (рисунок 14) в масштабе
 = 0,5 Н/мм. = 0,5 Н/мм.
Найдем величину отрезка, изображающего на плане сил вектор силы  : :
 = 1 мм; = 1 мм;
Из плана сил определяем
 = 40,5 Н. = 40,5 Н.
Рисунок 14. План сил для определения .
Напишем уравнение для определения кинетической энергии системы:
 . .
Для определения кинетической энергии системы определим кинетическую энергию каждого из тел, входящих в систему.
Кривошип 1 совершает вращательное движение относительно неподвижной оси, поэтому его кинетическая энергия равна:
 , ,
где  – момент инерции кривошипа 1 относительно точки A, кг∙м2
. – момент инерции кривошипа 1 относительно точки A, кг∙м2
.
Рычаг 2 совершает плоскопараллельное движение, поэтому его кинетическая энергия равна:
 , ,
где  - скорость центра масс рычага 2, м/с; - скорость центра масс рычага 2, м/с;
 - момент инерции рычага 2 относительно центра масс, кг∙м2
. - момент инерции рычага 2 относительно центра масс, кг∙м2
.

Кривошип 3 совершает вращательное движение относительно неподвижной оси, поэтому его кинетическая энергия равна:
 , ,
где  – момент инерции кривошипа 3 относительно центра масс, кг∙м2
. – момент инерции кривошипа 3 относительно центра масс, кг∙м2
.

|