1. Изучение свойств управляемого объекта
1.1 Общие сведения об управляемом объекте
Управляемый объект-это техническое средство, предназначенное для замены труда человека в технологических операциях и функционирующее в соответствии с физическими законами, положенными в основу его создания.
Функционирование управляемого объекта означает, что в нем протекают технические процессы, ход которых оценивается изменением во времени физических величин. Состояние управляемого объекта определяется значениями этих величин в каждый момент времени, которые называются переменными состояния. Та часть переменных состояния, которая доступна наблюдению или измерению, называется выходными координатами управляемого объекта. Измеряемыми выходными координатами называются те физические величины, значения которых можно определить путем измерения с помощью измерительных преобразователей. Наблюдаемыми считаются те выходные координаты, значения которых можно вычислить по значениям измеряемых выходных координат по известным соотношениям между ними в силу физических законов.
Так как управляемый объект предназначен для выполнения определенных технологических операций, то для правильного функционирования объекта ход технического процесса в нем должен быть подчинен определенной совокупности правил и предписаний. Эта совокупность правил и предписаний, ведущая к правильному ходу технического процесса в управляемом объекте, называется алгоритмом его функционирования. Для обеспечения правильности хода технического процесса в управляемом объекте его состояние должно изменяться. Изменение состояния управляемого объекта происходит под действием на него физических величин, способных вызвать это изменение, и которые бывают двух видов – управляющие воздействия и возмущения. Управляющие воздействия – это специально организованные воздействия извне для наилучшего достижения алгоритма функционирования управляемого объекта. Для осуществления управляющих воздействий в управляемом объекте при его создании предусматриваются специальные функциональные устройства – управляющие органы. Управляющие воздействия подаются непосредственно на управляющие органы управляемого объекта. Поэтому точки приложения управляющих воздействий известны и эти точки принято называть входами управляемого объекта. Изменение состояния управляющих органов приводит к изменению состояния всего управляемого объекта. Характерной особенностью взаимодействия управляющих органов с управляемым объектом является то, что энергия, необходимая для изменения состояния управляющих органов, гораздо меньше энергии, возникающей в управляемом объекте при изменении его состояния под действием управляющих воздействий. Возмущения препятствуют нормальному ходу технического процесса в управляемом объекте и бывают двух видов – нагрузка и помехи. Нагрузка оказывает влияние на состояние управляемого объекта в силу физических законов, на которых основано его функционирование. Помехи характеризуют влияние окружающей среды на состояние управляемого объекта. Точки приложения возмущений обычно заранее неизвестны. На рис.1 показан некоторый управляемый объект УО, имеющий органы управления ОУ и выходные координаты  , на входы которого подаются управляющие воздействия , на входы которого подаются управляющие воздействия  и на который действуют возмущения и на который действуют возмущения  : :
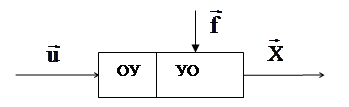
Рис.1 Условное обозначение управляемого объекта
Между указанными физическими величинами при функционировании объекта существует связь, которую можно записать следующим образом:
 где под А следует понимать оператор для динамических объектов или функцию для объектов статических. И в том, и в другом случаях А учитывает свойства объекта. Другими словами, в первом случае связь между выходными координатами, управляющими воздействиями и возмущениями описывается интегро-дифференциальными уравнениями, а во втором - алгебраическими. Для правильного функционирования управляемого объекта необходимо, чтобы выходные координаты управляемого объекта изменялись в соответствии с заданным алгоритмом его функционирования. Алгоритм функционирования представляет собой заданный закон изменения выходных координат, который можно записать в общем виде следующим образом: где под А следует понимать оператор для динамических объектов или функцию для объектов статических. И в том, и в другом случаях А учитывает свойства объекта. Другими словами, в первом случае связь между выходными координатами, управляющими воздействиями и возмущениями описывается интегро-дифференциальными уравнениями, а во втором - алгебраическими. Для правильного функционирования управляемого объекта необходимо, чтобы выходные координаты управляемого объекта изменялись в соответствии с заданным алгоритмом его функционирования. Алгоритм функционирования представляет собой заданный закон изменения выходных координат, который можно записать в общем виде следующим образом:
 . .
Для систем стабилизации  , а для следящих систем , а для следящих систем  является заранее неизвестной функцией времени. Цель управления состоит в том, чтобы в любой момент времени является заранее неизвестной функцией времени. Цель управления состоит в том, чтобы в любой момент времени . Однако это условие соответствует идеальному случаю управления, которого на практике не получить. В реальных условиях цель управления формулируется менее жестко: . Однако это условие соответствует идеальному случаю управления, которого на практике не получить. В реальных условиях цель управления формулируется менее жестко:  Как отмечалось выше, достижение цели управления осуществляется за счет формирования соответствующим образом управляющих воздействий. Как отмечалось выше, достижение цели управления осуществляется за счет формирования соответствующим образом управляющих воздействий.
1.2 Исследование свойств управляемого объекта
На этапе аналитического конструирования системы управления изучение свойств управляемого объекта выполняется по его математической модели. Модели процессов в объекте могут быть представлены в различных видах. Рассмотрим некоторые из них на примере одномерного объекта, процессы в котором описываются нелинейным дифференциальным уравнением третьего порядка.
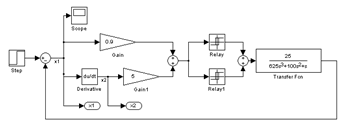
1. Модель объекта в виде структурной схемы.
Математическая модель управляемого объекта, представленная в виде структурной схемы:
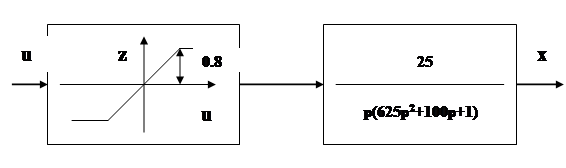
Первые представления о характере процессов в управляемом объекте можно сделать по структурной схеме. Объект является нелинейным, так как состоит из последовательно соединенных существенно нелинейного звена типа насыщение, интегрирующего звена и апериодического звена второго порядка, поэтому в состоянии статического равновесия объект находиться не может – при любом значении управляющего воздействия U, кроме нулевого. Выходная координата Xбудет возрастать по абсолютному значению. В объекте возможен установившийся режим- движение с постоянной скоростью изменения выходной координаты, который наступит после окончания переходного процесса в апериодическом звене второго порядка при условии, что управляющее воздействие постоянно. Максимальная скорость изменения выходной координаты зависит от значения управляющего воздействия и параметров нелинейного звена с характеристикой типа насыщение. Очевидно, что после звена с насыщением значение сигнала не может превышать ±0.8, поэтому численное значение установившейся скорости не превышает 20 с учетом коэффициента передачи объекта по управляющему воздействию, равному 25. Характер нарастания выходной координаты вначале движения при подаче на вход ступенчатого управляющего воздействия должен быть!!!!монотонным!!!, так как он определяется апериодическим звеном второго порядка, корни характеристического уравнения которого равны:
λ1 = -0,0107
λ2 = -0,149
2. Модель управляемого объекта в виде уравнения
.
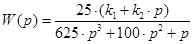
Для составления дифференциального уравнения объекта воспользуемся его операторной записью, которую получим из структурной схемы:
x = (25/(p(625p2
+100p+1)))u, если |u| < 0.8
x = (20/(p(625p2
+100p+1)))u, если |u| > 0.8
Дифференциальные уравнения для этих двух случаев последовательно можно получить следующим образом
[p(625p2
+100p+1)]x=25u, если |u| < 0.8,
[p(625p2
+100p+1)]x=20 sign (u), если |u| > 0.8,
C учетом оператора дифференцирования  : :


3. Модель управляемого объекта в пространстве состояний
Переход к модели в пространстве состояний осуществляется по известному алгоритму. Переменными состояния  принимаются выходная координата и её производные. Последовательно выполняя замены, приняв принимаются выходная координата и её производные. Последовательно выполняя замены, приняв  , запишем систему уравнений в пространстве состояний: , запишем систему уравнений в пространстве состояний:
   , если | u | < 0.8, , если | u | < 0.8,
 если | u | > 0.8. если | u | > 0.8.
Дальнейшие исследования свойств управляемого объекта можно выполнить, используя модели при подаче на вход типовых воздействий.
4.Переходные характеристики объекта
Для получения переходной характеристики управляемого объекта по выходной координате подадим на вход ступенчатый сигнал  , а к выходу подключим осциллограф. , а к выходу подключим осциллограф.


Переходные характеристики управляемого объекта с нелинейным элементом по выходной координате и ее скорости.
Предположения при анализе структурной схемы управляемого объекта подтвердились, т.е. при подаче на вход ступенчатого воздействия выходная координата неограниченно растет, а изменение ее скорости носит монотонный характер.
Установившееся значение скорости достигается примерно за 5
00[c]:

Переходные характеристики управляемого объекта без нелинейного элемента по выходной координате и ее скорости.
Установившееся значение скорости достигается примерно за 6
00[c]:
5. Частотные характеристики объекта

ЛАХ и ЛФХ управляемого объекта.
По полученным графикам можем определить частоту среза: ωc
= 0.332[рад/сек].
2. Обоснование выбора структуры системы управления
2.1 Постановка задачи
Автоматическая система управления представляет собой совокупность управляемого объекта и автоматического управляющего устройства.

Известны три принципа управления – разомкнутого, замкнутого и компенсации возмущений. Наиболее разумно выбрать замкнутый принцип управления, так как задана высокая точность и не определен характер внешних воздействий. В этом случае управляющее воздействие будем формировать в виде функции:
где f
– неубывающая функция отклонения х
, его производных и интеграла, причем х
= Хзад
– Х. значение Хзад
определяется заданным алгоритмом функционирования системы и представляет собой известную функцию времени, в частности, для систем стабилизации Хзад
= const. В качестве первого приближения можно выбрать пропорциональный регулятор, в котором управляющее воздействие формируется в виде  , где , где  - коэффициент передачи регулятора, который можно изменять для достижения наилучшего качества управления в рамках выбранной структуры. - коэффициент передачи регулятора, который можно изменять для достижения наилучшего качества управления в рамках выбранной структуры.
2.2 Исследование системы управления с пропорциональным регулятором
Составим структурную схему системы управления для заданного управляемого объекта при пропорциональном регулировании.
Оценим собственные свойства системы регулирования при выбранной структуре управляющего устройства. Для этого исследуем свободное движение в замкнутой системе, считая, что это движение вызвано некоторым начальным отклонением и не зависит от входного воздействия, как задающего, так и возмущения.
Запишем математическую модель замкнутой системы относительно отклонения x в операторной форме:

 , ,
где  . .
или в виде дифференциального уравнения
 если | u | < 0,8 если | u | < 0,8
 , если | u | > 0,8. , если | u | > 0,8.
Так как при исследовании собственных свойств системы  , а при замыкании системы как следует из структурной схемы , а при замыкании системы как следует из структурной схемы  , поэтому уравнения движения примут вид: , поэтому уравнения движения примут вид:
 , если | u | < 0,8 , если | u | < 0,8
 , если | u | > 0,8. , если | u | > 0,8.
Анализ уравнений движения показывает, что:
При  линейная обратная связь в системе отсутствует, и что в этом случае движение в системе определяется свойствами управляемого объекта, исследованными ранее при условии, что на его вход подается постоянное по значению управляющее воздействие. Знак этого воздействия такой, чтобы отклонение всегда уменьшалось, что определяется знаком обратной связи. Очевидно, что в рассматриваемом случае мы имеем дело с релейной системой управления. линейная обратная связь в системе отсутствует, и что в этом случае движение в системе определяется свойствами управляемого объекта, исследованными ранее при условии, что на его вход подается постоянное по значению управляющее воздействие. Знак этого воздействия такой, чтобы отклонение всегда уменьшалось, что определяется знаком обратной связи. Очевидно, что в рассматриваемом случае мы имеем дело с релейной системой управления.
При  движение в системе описывается линейным дифференциальным уравнением третьего порядка с постоянными коэффициентами. В установившемся режиме после окончания переходного процесса значение ошибки равно 0, что подтверждается структурой системы - система является астатической с одним интегрирующим звеном. В таких системах, как известно, ошибка по положению равна 0, а ошибка по скорости обратно пропорциональна коэффициенту передачи системы по скорости, т.е. добротности. движение в системе описывается линейным дифференциальным уравнением третьего порядка с постоянными коэффициентами. В установившемся режиме после окончания переходного процесса значение ошибки равно 0, что подтверждается структурой системы - система является астатической с одним интегрирующим звеном. В таких системах, как известно, ошибка по положению равна 0, а ошибка по скорости обратно пропорциональна коэффициенту передачи системы по скорости, т.е. добротности.
Определим предельное значение k
по критерию Гурвица, при котором линейная система будет находиться на границе устойчивости.
Динамические характеристики системы
Исследуем динамические характеристики системы, прежде всего устойчивость, и возможности их изменения за счет изменения параметров регулятора, которые в данном случае ограничены изменением значений коэффициента передачи регулятора k
. Неустойчивость движений в рассматриваемой системе может быть вызвана двумя причинами – неустойчивостью движения в финальной стадии из-за неустойчивости линейной системы и неустойчивостью, вызванной релейным режимом работы системы при  . .
По критерию Гурвица определим диапазон значений параметра k
, при которых система асимптотически устойчива (частный случай(n=2)):

(ПФ, составленная для встречно-параллельного соединения)
Составим ХП:


Матрица Гурвица:


 , тогда 100+250k>0 k > - 0.4 , тогда 100+250k>0 k > - 0.4
Переходные характеристики
Оценим переходные характеристики системы при различных значениях k
для устойчивых режимов работы.


при  время нарастания переходного процесса время нарастания переходного процесса  ; ;
при  время нарастания переходного процесса время нарастания переходного процесса  ; ;
при  время нарастания переходного процесса время нарастания переходного процесса . .
Из полученных графиков можно сделать вывод, что время нарастания переходной характеристики неустойчивой системы гораздо меньше, чем время нарастания переходной характеристики устойчивой системы. По мере увеличения коэффициента передачи системы оно уменьшается. В устойчивой системе время нарастания значительно больше и в тоже время неустойчивая система не может рассматриваться в качестве рабочего проекта. Так как нам необходимо обеспечить минимально возможное время переходного процесса, то данная структура управляющего устройства нам не подходит.
2.3 Исследование системы управления с пропорционально-дифференциальным регулятором

Задачу повышения быстродействия при сохранении устойчивости можно решить за счёт изменения структуры регулятора – перейдем к пропорционально-дифференциальному регулятору, в котором управляющее воздействие формируется по закону
 . .
Идея повышения быстродействия системы заключается в увеличении  при одновременном увеличении при одновременном увеличении  . Причем увеличение должно привести к увеличению скорости нарастания переходной характеристики, а увеличение - к уменьшению колебательности и увеличению запасов устойчивости. . Причем увеличение должно привести к увеличению скорости нарастания переходной характеристики, а увеличение - к уменьшению колебательности и увеличению запасов устойчивости.
При указанном законе управления уравнения свободного движения относительно ошибки запишутся следующим образом:
, где 
- в виде дифференциального уравнения:
Если :


Если :

Передаточная функция замкнутой системы имеет вид:


Матрица Гурвица:

 , тогда , тогда 

(выражение больше нуля когда к1 и к2 оба больше нуля, тогда к1>-0,04)
Переходные характеристики
Построим переходные характеристики для различных согласованных значений коэффициентов k1
и k2
:
1 – k1
= 1, k2
= 10;
2 – k1
= 10, k2
= 1;
3 – k1
= 100, k2
= 10;

Из полученных графиков, видно, что для устойчивых режимов движения можно повлиять на быстродействие системы методом подбора коэффициентов. Но существенно повлиять на быстродействие системы невозможно.
2.4 Оценка влияния нелинейного элемента на свойства линейной системы
Влияние нелинейного элемента на свойства линейной системы оценим по результатам моделирования процессов в исследуемой системе с ПД- регулятором. На графиках показаны изменения выходной координаты в установившемся режиме для систем с нелинейным элементом и без него.


1 – ПХ системы без нелинейного элемента
2 – ПХ системы с нелинейным элементом
Как и следовало ожидать, в данном случае наличие нелинейного элемента оказывает вредное влияние на свойства системы. А именно введение в линейную систему нелинейного элемента приводит к возрастанию колебательности процесса.
2.5 Исследование системы управления с пропорциональным регулятором
Составим структурную схему системы управления для заданного управляемого объекта при пропорциональном регулировании.
Оценим собственные свойства системы регулирования при выбранной структуре управляющего устройства. Для этого исследуем свободное движение в замкнутой системе, считая, что это движение вызвано некоторым начальным отклонением и не зависит от входного воздействия, как задающего, так и возмущения.
Запишем математическую модель замкнутой системы относительно отклонения x в операторной форме:

,
где  ). ).
или в виде дифференциального уравнения
 если | u | < 0,8 если | u | < 0,8
 , если | u | > 0,8. , если | u | > 0,8.
Так как при исследовании собственных свойств системы , а при замыкании системы как следует из структурной схемы , поэтому уравнения движения примут вид:
 , если | u | < 0,8 , если | u | < 0,8
 , если | u | > 0,8. , если | u | > 0,8.
Анализ уравнений движения показывает, что:
При линейная обратная связь в системе отсутствует, и что в этом случае движение в системе определяется свойствами управляемого объекта, исследованными ранее при условии, что на его вход подается постоянное по значению управляющее воздействие. Знак этого воздействия такой, чтобы отклонение всегда уменьшалось, что определяется знаком обратной связи. Очевидно, что в рассматриваемом случае мы имеем дело с релейной системой управления.
При движение в системе описывается линейным дифференциальным уравнением третьего порядка с постоянными коэффициентами. В установившемся режиме после окончания переходного процесса значение ошибки равно 0, что подтверждается структурой системы - система является астатической с одним интегрирующим звеном. В таких системах, как известно, ошибка по положению равна 0, а ошибка по скорости обратно пропорциональна коэффициенту передачи системы по скорости, т.е. добротности.
Определим предельное значение k
по критерию Гурвица, при котором линейная система будет находиться на границе устойчивости.
Динамические характеристики системы
Исследуем динамические характеристики системы, прежде всего устойчивость, и возможности их изменения за счет изменения параметров регулятора, которые в данном случае ограничены изменением значений коэффициента передачи регулятора k
. Неустойчивость движений в рассматриваемой системе может быть вызвана двумя причинами – неустойчивостью движения в финальной стадии из-за неустойчивости линейной системы и неустойчивостью, вызванной релейным режимом работы системы при  . .
По критерию Гурвица определим диапазон значений параметра k
, при которых система асимптотически устойчива (частный случай(n=3)):

(ПФ, составленная для встречно-параллельного соединения)
Составим ХП:


Матрица Гурвица:


 , тогда , тогда  k < 0.0064 k < 0.0064

Таким образом, система асимптотически устойчива при 0<k<0,0064.
Переходные характеристики
Оценим переходные характеристики системы при различных значениях k
для устойчивых режимов работы.


Переходные характеристики в устойчивой и неустойчивой системах
при  время нарастания переходного процесса время нарастания переходного процесса ; ;
при  время нарастания переходного процесса время нарастания переходного процесса ; ;
при  время нарастания переходного процесса время нарастания переходного процесса . .
По переходным характеристикам видно, что при k=0,005 время нарастания составляет примерно 30 секунды. При k=0,003 это время составляет 40 секунд. Время нарастания в неустойчивой системе (k=0.008) наступает быстрее, однако такие системы непригодны для проектирования ввиду своей неустойчивости.
2.6 Исследование системы управления с пропорционально-дифференциальным регулятором

Задачу повышения быстродействия при сохранении устойчивости можно решить за счёт изменения структуры регулятора – перейдем к пропорционально-дифференциальному регулятору, в котором управляющее воздействие формируется по закону
 . .
Идея повышения быстродействия системы заключается в увеличении  при одновременном увеличении при одновременном увеличении  . Причем увеличение должно привести к увеличению скорости нарастания переходной характеристики, а увеличение - к уменьшению колебательности и увеличению запасов устойчивости. . Причем увеличение должно привести к увеличению скорости нарастания переходной характеристики, а увеличение - к уменьшению колебательности и увеличению запасов устойчивости.
При указанном законе управления уравнения свободного движения относительно ошибки запишутся следующим образом:
 , где , где 
- в виде дифференциального уравнения:
 , если | u | < 0,8, , если | u | < 0,8,
 ,если | u | > 0,8. ,если | u | > 0,8.
Передаточная функция замкнутой системы имеет вид:


Матрица Гурвица:
 тогда 15625 тогда 15625 < 100+250 < 100+250
< 0.016+0.0064

Тогда:  > 62.5 - 0.4 > 62.5 - 0.4
Переходные характеристики
Построим переходные характеристики для различных согласованных значений коэффициентов k1
и k2
:
1 – k1
= 0.1, k2
= 6;
2 – k1
= 0,001, k2
= 0,1;
3 – k1
= 1, k2
=65;
4 – k1
= 0,5, k2
= 35;

2.6 Оценка влияния нелинейного элемента на свойства линейной системы
Влияние нелинейного элемента на свойства линейной системы оценим по результатам моделирования процессов в исследуемой системе с ПД- регулятором. На графиках показаны изменения выходной координаты в установившемся режиме для систем с нелинейным элементом и без него.


1 – ПХ системы с нелинейным элементом
2 – ПХ системы без нелинейного элемента
Наличие нелинейного элемента оказывает вредное влияние на свойства системы. Введение в линейную систему нелинейного элемента приводит к возрастанию колебательности процесса.
3. Принцип построения систем с переменной структурой
3.1 Основные виды СПС
Одним из методов аналитического конструирования СПС является метод фазового пространства. Рассмотрим некоторые особенности фазового пространства линейных структур и некоторые идеи, положенные в основу построения СПС.
Предположим, что в нашем распоряжении имеется две, пусть даже неустойчивые линейные структуры, но в фазовом пространстве одной из них существует гиперплоскость с устойчивым вырожденным движением. Тогда следует выбрать такую последовательность изменения этих структур, чтобы, во-первых, любая траектория в фазовом пространстве Х пересекала эту гиперповерхность, и, во-вторых, в момент попадания изображающей точки на эту гиперплоскость структура системы совпадала со структурой с устойчивым вырожденным движением. Построенная таким образом система будет устойчивой для любых начальных условий.
Рассмотрим этот принцип на примере системы второго порядка. В качестве структуры с устойчивым вырожденным движением примем неустойчивую структуру с фазовыми траекториями типа ‘седло’:
для анализа линейной системы возьмем уравнения, описывающие изменение скорости в ранее рассмотренном управляемом объекте при условии, что в качестве управляющего устройства применяется пропорционально – дифференциальный регулятор. Уравнения для рассогласования в этом случае запишутся без учёта нелинейного элемента следующим образом:



Рассчитаем  и и  в уравнении вида: в уравнении вида:

таким образом, чтобы корни характеристического уравнения были бы вещественными, но разных знаков.

Для того, чтобы корни были вещественные необходимо, чтобы выполнялись условия:
1. 
2. 
Из первого неравенства получаем:

Из второго неравенства получаем:


Возьмем  . .
Тогда:

Тогда пусть  . .
При таких k, корни характеристического уравнения будут равны:
λ1
= 0.58
λ2
= -0.34
Структурная схема системы с устойчивым вырожденным движением:

Фазовая траектория системы представлена:

Решения уравнения запишутся следующим образом:


Если начальные условия для решений выбрать так, что  , то , то  или или  ,а для нашего примера получим: ,а для нашего примера получим:  . Это уравнение прямой на фазовой плоскости, наклон которой равен . Это уравнение прямой на фазовой плоскости, наклон которой равен  с учётом знака, которая проходит во втором и четвёртом квадрантах. Эта прямая и является совокупностью устойчивых фазовых траекторий для неустойчивой системы второго порядка. Если в начальный момент времени изображающая точка находится на прямой S, то она будет асимптотически приближаться к началу координат. В то же время необходимо отметить, что любые сколь угодно малые возмущения могут отклонить точку от устойчивой траектории S и в системе возникает неустойчивое движение. По этой причине движение, происходящее по траекториям, принадлежащим гиперплоскости устойчивых движений, принято называть вырожденным. с учётом знака, которая проходит во втором и четвёртом квадрантах. Эта прямая и является совокупностью устойчивых фазовых траекторий для неустойчивой системы второго порядка. Если в начальный момент времени изображающая точка находится на прямой S, то она будет асимптотически приближаться к началу координат. В то же время необходимо отметить, что любые сколь угодно малые возмущения могут отклонить точку от устойчивой траектории S и в системе возникает неустойчивое движение. По этой причине движение, происходящее по траекториям, принадлежащим гиперплоскости устойчивых движений, принято называть вырожденным.
Эта особенность фазового пространства линейных систем позволяет наметить один из возможных принципов построения систем с переменной структурой.
3.2 Система с переменной структурой с устойчивым вырожденным движением
Предположим, что в нашем распоряжении имеется две, пусть даже неустойчивые линейные структуры, но в фазовом пространстве одной из них существует гиперплоскость с устойчивым вырожденным движением. Тогда следует выбрать такую последовательность изменения этих структур, чтобы, во-первых, любая траектория в фазовом пространстве Х пересекала эту гиперповерхность, и, во-вторых, в момент попадания изображающей точки на эту гиперплоскость структура системы совпадала со структурой с устойчивым вырожденным движением. Построенная таким образом система будет устойчивой для любых начальных условий.
Проиллюстрируем этот принцип на примере системы второго порядка. В качестве структуры с устойчивым вырожденным движением примем неустойчивую структуру с фазовыми траекториями типа ‘седло’. В качестве второй неустойчивой структуры примем структуру с фазовыми траекториями типа ‘неустойчивый фокус’, то есть, раскручивающиеся спирали.
Для получения такой фазовой траектории необходимо, чтобы корни характеристического уравнения были комплексными сопряженными с положительными вещественными частями. Такую структуру можно получить за счёт соответствующего подбора коэффициентов в регуляторе. Уравнение замкнутой системы было получено ранее:
Рассчитаем и в уравнении вида:
таким образом, чтобы корни характеристического уравнения, были бы комплексно-сопряженными и имели положительные вещественные части.
Для того, чтобы корни были комплексно-сопряженными необходимо, чтобы выполнялись условия:
1. 
2. 
Из первого неравенства получаем:
Из второго неравенства получаем: 
Знак минус перед говорит о том, что обратная связь по производной от отклонения должна быть положительной, что в свою очередь объясняется тем, что сам объект является асимптотически устойчивым.
Возьмем  . .
Тогда:

Возьмем  0. 0.
Тогда корни характеристического уравнения будут равны:
Структурная схема системы с фазовой траекторией типа “ неустойчивый фокус ”


Фазовые траектории вида неустойчивый фокус.
Далее возникает задача: выбрать такую последовательность изменения структур, чтобы движение было устойчивым. Решим эту задачу методом фазовой плоскости. Разобьем фазовую плоскость  на две области 1 и 2, границами которых является прямая S и ось на две области 1 и 2, границами которых является прямая S и ось  . Если состояние системы таково, что изображающая точка находится в области 1, то её движение должно происходить по раскручивающимся спиралям (система должна иметь вторую структуру). В области 2 изображающая точка должна двигаться по кривым гиперболического типа (система должна иметь первую структуру). . Если состояние системы таково, что изображающая точка находится в области 1, то её движение должно происходить по раскручивающимся спиралям (система должна иметь вторую структуру). В области 2 изображающая точка должна двигаться по кривым гиперболического типа (система должна иметь первую структуру).
Структурная схема системы с переменной структурой с вырожденным устойчивым движением с учетом рассчитанных коэффициентов:
Фазовая траектория системы с вырожденным устойчивым движением:

Переходная характеристика системы с вырожденным устойчивым движением:

Этот подход позволяет построить устойчивую систему и отказаться от требований устойчивости для каждой из имеющихся структур. Однако в рассматриваемом случае движение по линии переключения отсутствует, так как инерционные силы смещают изображающую точку с этой линии, её дальнейшее движение происходит по другой фазовой траектории, но в целом движение остаётся асимптотически устойчивым - фазовая траектория стягивается к началу координат.
3.3 Система с переменной структурой без устойчивого вырожденного движения
Другой способ построения системы с переменной структурой целесообразно использовать в случае, если фазовое пространство для каждой из фиксированных структур не содержит гиперплоскостей с устойчивым вырожденным движением. За счёт ‘сшивания’ в определенной последовательности участков из неустойчивых траекторий удается получить устойчивое движение для любых начальных условий.
В качестве примера рассмотрим случай, когда в нашем распоряжении имеются две линейные структуры с незатухающими колебаниями, то есть, находящиеся на границе устойчивости.
Уравнения движения в этих системах одно и то же:

При разных значениях  фазовые траектории систем будут иметь вид эллипсов с разными полуосями. фазовые траектории систем будут иметь вид эллипсов с разными полуосями.
Уравнения для рассогласования без учета нелинейного элемента имеет вид:
Для получения фазовой траектории типа эллипс необходимо выполнение двух условий:
В соответствии с полученными ограничениями для первой структуры возьмем  0, а для второй 0, а для второй  . .
При 0: 
При : 
Структурная схема такой системы будет иметь вид:

Фазовые траектории первой и второй структур изображены ниже, где цифрами 1 и 2 обозначены:
1 – фазовая траектория при 
2 – фазовая траектория при 
Фазовые траектории первой и второй структур изображены ниже, где цифрами 1 и 2 обозначены:
1 – фазовая траектория при
2 – фазовая траектория при

Фазовые траектории при различных значениях ω0
Переключение с одной структуры на другую будет происходить при пересечении фазовой траекторией координатных осей. Аналитический закон переключения структур запишется следующим образом:
если  , ,
если  . .
Структурная схема системы с переменной структурой без устойчивого вырожденного движения с учетом рассчитанных коэффициентов

Фазовая траектория СПС без устойчивого вырожденного движения:

Переходная характеристика СПС без устойчивого вырожденного движения:

3.4 Системы с переменной структурой со скользящим режимом движения
Наиболее рациональной считается идея синтеза систем с переменной структурой с искусственным вырожденным движением. Сущность этого подхода заключается в следующем. Как и прежде считается, что имеется несколько линейных структур, не обязательно устойчивых, из которых синтезируется система с переменной структурой. В фазовом пространстве искусственно задается некоторая гиперплоскость S, движение в которой обладает желаемыми свойствами, причем траектории, лежащие в этой плоскости, не принадлежат ни одной из линейных структур. Последовательность изменения структур должна быть выбираема такой, чтобы изображающая точка при любых начальных условиях всегда попадала на эту плоскость, а затем двигалась (скользила) по ней. Тогда с момента попадания на эту гиперплоскость в системе будет существовать искусственное вырожденное движение, которое можно наделить рядом полезных свойств, не принадлежащих ни одной из фиксированных структур.
Для рассмотренной ранее СПС с устойчивым вырожденным движением, которое определяется уравнением  , введем на фазовой плоскости линию скольжения , введем на фазовой плоскости линию скольжения  . Все остальные параметры управляющего устройства оставим без изменений. . Все остальные параметры управляющего устройства оставим без изменений.
Структурная схема системы с переменной структурой со скользящим режимом движения

Переход от одной структуры к другой осуществляется в соответствии с законом переключения:
Фазовая траектория СПС со скользящим режимом движения:

Переходная характеристика СПС со скользящим режимом движения:

Сравнивая СПС с линейными системами регулирования, видно, что СПС дают существенно лучшие показатели. Как видно из полученных графиков в СПС без вырожденного устойчивого движения и в СПС с вырожденным устойчивым движением существуют колебания, а в СПС со скользящим режимом колебания отсутствуют. Таким образом, изменяя целенаправленно параметры СПС, можно влиять на качественные показатели системы.
Таким образом, подводя итоги, можем отметить, что СПС может быть построена по одному из трех рассмотренных выше принципов. В большинстве случаев предпочтение отдается системам со скользящим режимом в силу их специфических свойств.
4. Синтез СПС со скользящим режимом методами фазового пространства
4.1 Синтез управляющего устройства СПС третьего порядка без учета нелинейности
Выполним синтез СПС для управляемого объекта третьего порядка с математической моделью
 если | u | < 0,8 если | u | < 0,8
 , если | u | > 0,8. , если | u | > 0,8.
Было установлено, что система должна иметь замкнутую структуру, при этом в силу специфики объекта для обеспечения качественного управления эта структура должна быть переменной. На первом этапе аналитического конструирования не будем учитывать характер входных воздействий и ограничения вида насыщения, а синтезируем систему, обеспечивающую качественные показатели в свободном движении, вызванном некоторым начальным отклонением. Основными требованиями к системе будем считать точность, характер переходного процесса, быстродействие. Конкретные значения этих показателей уточним в процессе синтеза системы.
Запишем модель управляемого объекта с учетом принятых соглашений для её дальнейшего использования в процессе синтеза. Так как при свободном движении  =0, уравнения движения запишутся следующим образом: =0, уравнения движения запишутся следующим образом:
- в виде дифференциального уравнения:
 ; ;
 . .
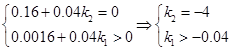
- в пространстве состояний:

где  = 0.16; = 0.16;  = 0.0016; = 0.0016;  = 0; b = 0.04. = 0; b = 0.04.
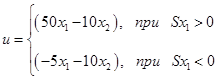
Рассмотрим возможность положительного решения задачи синтеза при простейшей структуре СПС со скользящим движением, а именно, синтезируем СПС с управлением вида:
 ; ;  , ,
где  - постоянные коэффициенты причем - постоянные коэффициенты причем  . .
 - уравнение, задающее некоторую гиперплоскость, которая является при принятых выше соотношениях границей разрыва управляющего воздействия u. - уравнение, задающее некоторую гиперплоскость, которая является при принятых выше соотношениях границей разрыва управляющего воздействия u.
Так как фактически структура системы определена, в результате синтеза необходимо определить параметры СПС, а именно, значения  , ,  , ,  и и  , обеспечивающие требуемые показатели качества разрабатываемой системы. , обеспечивающие требуемые показатели качества разрабатываемой системы.
Условия существования скользящего режима для системы произвольного порядка имеют вид:
Так как наша система третьего порядка, то  , а , а  принимает значения принимает значения  . Тогда с учетом параметров объекта (= 0.16; = 0.0016; = 0; b = 0.04) условия существования скользящего режима запишутся следующим образом: . Тогда с учетом параметров объекта (= 0.16; = 0.0016; = 0; b = 0.04) условия существования скользящего режима запишутся следующим образом:
При определении условий существования скользящего режима необходимо учитывать то обстоятельство, что движение в скользящем режиме может оказаться неустойчивым. Для обеспечения устойчивого движения в скользящем режиме при управляющем воздействии вида  в системах с переменной структурой рассматриваемого типа характеристическое уравнение исходной системы в системах с переменной структурой рассматриваемого типа характеристическое уравнение исходной системы  при при  должно иметь не более одного корня с положительной вещественной частью: должно иметь не более одного корня с положительной вещественной частью:

Из решения этого уравнения получаем, что оно будет иметь не более одного корня с положительной вещественной частью при  и и  . .
Рассмотрим теперь условия попадания изображающей точки на плоскость скольжения для системы третьего порядка.
Уравнения движения для данного случая можно представить в виде
 , , , ,  - const, b>0, - const, b>0,
; ,
где - постоянные коэффициенты причем

Причем  -постоянные коэффициенты, -постоянные коэффициенты,  , а прямая S = 0 является линией скольжения. Если выполнены условия существования скользящего режима для коэффициентов , а прямая S = 0 является линией скольжения. Если выполнены условия существования скользящего режима для коэффициентов  , то для попадания изображающей точки на плоскость скольжения S=0 необходимо и достаточно, чтобы в характеристическом уравнении системы , то для попадания изображающей точки на плоскость скольжения S=0 необходимо и достаточно, чтобы в характеристическом уравнении системы  отсутствовали неотрицательные действительные корни. отсутствовали неотрицательные действительные корни.
Из решения этого уравнения получаем, что оно будет иметь отрицательные действительные корни при  . .
Из неравенства  можно сделать вывод, что при и можно сделать вывод, что при и   . При выборе значения . При выборе значения  будем руководствоваться тем, что его значение влияет на точность и быстродействие системы – чем больше , тем точнее система и тем быстрее заканчивается переходный процесс. К тому же все параметры, которые мы рассчитаем по условиям существования скользящего режима, будут уточняться по условиям устойчивости СПС. будем руководствоваться тем, что его значение влияет на точность и быстродействие системы – чем больше , тем точнее система и тем быстрее заканчивается переходный процесс. К тому же все параметры, которые мы рассчитаем по условиям существования скользящего режима, будут уточняться по условиям устойчивости СПС.
Пусть  и и  , тогда , тогда  определим следующим образом: определим следующим образом:
Подставим в третье уравнение и получим квадратное уравнение, решая которое определим .
По условиям существования скользящего режима , следовательно  . .
Но при подстановке такого значения с2,
система имеет апериодический характер переходного процесса, а по заданию он должен быть монотонным. С помощью моделирования определяем, что монотонного характера переходного процесса можно добиться увеличив значение с2
до 0,8. Поэтому принимаем  . .
Из неравенства  следует, что следует, что  . Примем . Примем  . .
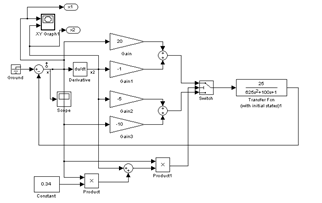
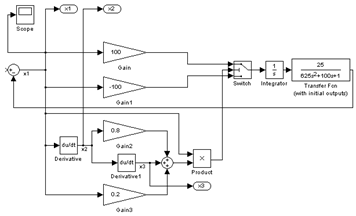
Схема моделирования:
С учетом рассчитанных параметров фазовые траектории СПС со скользящим режимом движения имеют вид:

1 – α = 50; 2 – α = 100; 3 – α = 200
Переходные характеристики в СПС третьего порядка:

1 – α = 200; 2 – α = 100; 3 – α = 50
Переходные характеристики получены при начальных отклонениях (0 1). Полученные характеристики позволяют сравнить качественные показатели СПС и обычной линейной системы. Как следует из переходных характеристик СПС, переходный процесс имеет монотонный характер, при этом время переходного процесса значительно меньше, чем в линейной системе. Изменяя параметры СПС, можно влиять на качественные показатели системы.
4.2 Учет ограничений управляющего воздействия в СПС
В реальных системах автоматического управления функциональные устройства, как правило, обладают нелинейными характеристиками. Можно утверждать, что практически все устройства автоматических систем являются нелинейными с кусочно-линейной характеристикой типа насыщение. Это обстоятельство объясняется тем, что во всех электрических, электронных, электромагнитных, и т.д. элементах выходной сигнал по мощности не может превышать мощности источника питания. Поэтому уровни напряжения и тока на выходе функциональных устройств не могут превышать аналогичных величин на выходе источника питания автоматической системы. Такие естественные ограничения могут существенно повлиять на качество системы, поэтому при синтезе системы необходимо учитывать наличие таких ограничений.
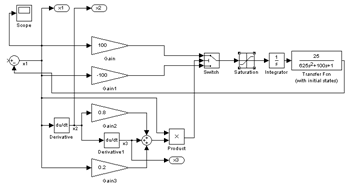
Рассмотрим, какое влияние на поведение системы окажет введение нелинейности.
Структурная схема системы и одновременно схема для моделирования процессов в системе:
Фазовые траектории СПС третьего порядка со скользящим режимом с нелинейным элементом и без него:

1 – ФТ СПС без нелинейного элемента
2 – ФТ СПС с нелинейным элементом
Переходные характеристики СПС с учетом нелинейного элемента и без него.
1 – ПХ СПС с нелинейным элементом
2 – ПХ СПС без нелинейного элемента

Как видно из приведенных графиков, при введении нелинейного элемента показатели системы ухудшились. Таким образом, при больших рассогласованиях система с переменной структурой при ограничении управляющего воздействия ведет себя как релейная система, а потому будет неустойчивой, когда неустойчива соответствующая релейная система.
Очевидным решением в данной ситуации является построение линии переключения в виде ломаной линии, состоящей из двух участков, S=S1
+S2
. На участке, где |x1
|<x0
построение линии переключения S1
ведется по рассмотренным выше правилам для СПС со скользящим режимом. На втором участке, где |x1
|>x0
, построение линии переключения S2
должно вестись по правилам релейной системы. При этих построениях следует учитывать релейную характеристику с зоной нечувствительности. Вид фазовых траекторий релейной системы должен соответствовать устойчивой релейной системе, при этом движение в релейной системе может быть скользящим или колебательным, сходящимся к началу координат.
s=tf([1],[1 0.8 0.4])
bode(s); margin(s)

Запас устойчивости по амплитуде составляет ≈ 80 [дБ]>20 [дБ]
Запас устойчивости по фазе равен 
Таким образом, в результате синтеза СПС со скользящим режимом без учета нелинейного элемента мы получили систему, обладающую характеристиками, соответствующими техническому заданию, а именно – характер переходного процесса монотонный, запас устойчивости “в малом” амплитуде больше 20 [дБ], по фазе больше 60°.
5. Синтез нелинейной СПС при больших отклонениях от равновесного состояния
Спроектированная система устойчива “в малом”, но неустойчива в «большом», поэтому синтезируем релейную систему соответствующую данной при отклонениях превышающих линейную зону нелинейного звена с насыщением. Звено с насыщением в этом случае будем рассматривать как реле с зоной нечувствительности – трехпозиционное реле.
5.1 Синтез релейной системы
Структурная схема релейной системы управления с обратной связью имеет вид:
Система состоит из линейной части с передаточной функцией W(p)=R(p)/Q(p), релейного элемента(трехпозиционное реле) и пропорционально-дифференциального регулятора. Как будет показано ниже, структура и параметры регулятора существенным образом влияют свойства релейной системы, в том числе и на устойчивость, что необходимо при построении нелинейных систем с переменной структурой.
Чтобы получить трехпозиционное реле без гистерезиса, собираем схему из суммы двух релейных звеньев(двухпозиционное реле с гистерезисом) и настраиваем релейные элементы (Relay) следующим образом:
Relay:
Switch on point: 0.8;
Switch off point: 0.8;
Output when on: 0.8;
Output when off: 0.
Relay1:
Switch on point: -0.8;
Switch off point: -0.8;
Output when on: 0;
Output when off: -0.8.
Определим с помощью моделирования параметры пропорционально-дифференциального регулятора, которые обеспечат существование автоколебательного режима. Например, при  и и  в релейной системе получим автоколебания. в релейной системе получим автоколебания.
Автоколебания в релейной системе управления:

Эти автоколебания имеют следующие характеристики:
f=1/T => w=2πf
частота колебаний w ≈ 0,1185 рад/с;
амплитуда колебаний А ≈ 15 ед.
Определим амплитуду и частоту автоколебаний методом гармонической линеаризации и гармонического баланса.
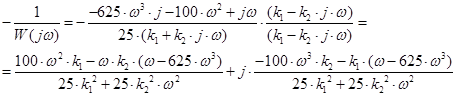
Как следует из этого метода, для определения существования автоколебательного режима необходимо любым методом найти решения уравнения
 , ,
где  – передаточная функция или коэффициент гармонической линеаризации нелинейного элемента, – передаточная функция или коэффициент гармонической линеаризации нелинейного элемента,  – амплитудно-фазовая характеристика линейной части системы. – амплитудно-фазовая характеристика линейной части системы.
Для нахождения решений данного уравнения чаще всего применяют аналитические или графоаналитические методы. Воспользуемся графоаналитическим методом нахождения решений уравнения гармонического баланса. Для этого построим два графика на комплексной плоскости:
 и и 
и найдем точку их пересечения, координаты которой дадут амплитуду и частоту автоколебаний.
Коэффициент гармонической линеаризации для трехпозиционного реле имеет вид:
 , ,
где Δ – параметр, определяющий зону нечувствительности реле; А – амплитуда возможных колебаний.
Программа построения графиков для нахождения решения уравнения в среде Matlab имеет вид:
w=[0:0.0001:1];
k1=0.9;
k2=5;
c=25*k1^2.+25*k2^2.*w.^2;
re=(100*k1.*w.^2-k2.*(w.^2-625*w.^4))./c;
im=(-100*k2.*w.^3-k1.*(w.^1-625*w.^3))./c;
plot(re, im);
hold on;
D=0.8;
A=[0:0.01:100];
re=4./(pi.*A).*(sqrt(1-(D./A).^2));
im=0;
plot(re, im);
Выполнив эту последовательность команд, получим два графика на комплексной плоскости:

1 – график  ; 2 – график ; 2 – график
Таким образом, получаем, что два графика на комплексной плоскости и  имеют пересечения при в точках с координатами (0;0) и (0.07;0). имеют пересечения при в точках с координатами (0;0) и (0.07;0).
Частоту автоколебаний определим, приравняв мнимую часть выражения для к нулю:

Амплитуду автоколебаний определим следующим образом:

В результате синтеза для рассматриваемого случая уравнение линии переключения получится в виде: S2
= 0.9x1
+ 5x2
+ d.
5.2 Исследование свойств спроектированной нелинейной СПС
На первом этапе нами была синтезирована СПС без учета нелинейности с линией скольжения S1
. Затем для синтеза СПС с нелинейным элементом мы синтезировали релейную систему для больших отклонений с линией переключения S2
= 0.9x1
+ 5x2
+ d,где значение в определяется координатами точки пересечения линий S1
и S2
. Значение в определяет характер процесса в СПС на завершающей стадии движения.
Структурная схема для моделирования имеет вид:
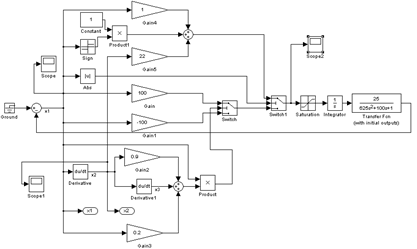
Рис. 5.6. Структурная схема нелинейной СПС
Параметры синтезированной нелинейной СПС отличаются от параметров, полученных при синтезе СПС без учета нелинейности и релейной системы для больших отклонений.
Были произведены следующие изменения:
1) увеличен коэффициент С1
пропорционально-дифференциального регулятора релейной части системы для повышения быстродействия;
2) увеличен коэффициент С2
пропорционально-дифференциального регулятора релейной части системы для уменьшения наклона линии переключения S2
= С1
x1
+ С2
x2
+ в и обеспечения скользящего режима при больших отклонениях;
Исследуем спроектированную систему.
Фазовая траектория и переходная характеристика нелинейной СПС:

Рис. 5.7. Фазовые траектории нелинейной СПС при различных значениях d

Рис. 5.8. Влияние точки сопряжения линий переключения на характер переходного процесса в нелинейной СПС
Согласно полученным данным можно сказать, что в спроектированной нелинейной СПС самый быстрый переходный процесс монотонного характера получаем при в ≈ 1.
Теперь рассмотрим эту же систему, в которой коэффициенты были подобраны автоматически с помощью возможностей среды Matlab.
Для этой системы ПХ и фазовая траектория выглядят следующим образом:
ПХ для малых отклонений:

ПХ для больших отклонений:

5.3 Редуцирование системы третьего порядка до системы второго порядка
Так как динамическая модель нашей нелинейной системы представляет собой систему дифференциальных уравнений третьего порядка, то её полное исследование в многомерном фазовом пространстве связано с большими трудностями. Однако при решении многих прикладных эти трудности могут быть преодолены путем применения редуцирования движений на фазовую плоскость. Суть редуцирования многомерного фазового пространства состоит в том, что после специального преобразования исходных уравнений можно исследовать движения в плоскости только двух переменных, если действие остальных переменных состояния системы учесть в уравнениях линий переключения. Такой подход позволяет не только представить графически характер поведения системы, но и использовать различные методы, которые достаточно глубоко и полно разработаны для систем второго порядка.
При редуцировании систем высокого порядка ставится задача не отыскания решений дифференциального уравнения, а проведение качественного исследования систем с выделением всех возможных движений и получении количественных их оценок в общем виде. В результате удается установить возможности рассматриваемой системы и наметить пути рационального выбора параметров или изменения её структуры.
Для редуцирования систем высокого порядка существует несколько методов, в зависимости сложности системы и режимов движений в ней. Осуществим редуцирование при помощи пакета MatLab.
Составим в командном окне MatLab следующую программу:
1. Зададим математическую модель нашей непрерывной системы в виде передаточной функции:
>> s=tf([25],[625 100 1 0])
Transfer function:
25
---------------------
625 s^3 + 100 s^2 + s
2. Зададим математическую модель нашей непрерывной системы в пространстве состояний:
>> w=ss(s)
a =
x1 x2 x3
x1 -0.16 -0.0512 0
x2 0.03125 0 0
x3 0 0.01563 0
b =
u1
x1 8
x2 0
x3 0
c =
x1 x2 x3
y1 0 0 10.24
d =
u1
y1 0
Continuous-time model.
3. Представим модель для пространства состояний в канонической форме:
>> c=canon(w,'modal')
a =
x1 x2 x3
x1 0 0 0
x2 0 -0.01072 0
x3 0 0 -0.1493
b =
u1
x1 2.441
x2 3.249
x3 8.808
c =
x1 x2 x3
y1 10.24 -8.29 0.2196
d =
u1
y1 0
Continuous-time model.
4. Понизим порядок (редуцируем) математическую модель нашей непрерывной системы:
>> rw=modred(c,1)
a =
x1 x2
x1 -0.01072 0
x2 0 -0.1493
b =
u1
x1 3.249
x2 8.808
c =
x1 x2
y1 -8.29 0.2196
d =
u1
y1 0
Continuous-time model.
5. Передаточная функция математической модели нашей редуцированной непрерывной системы имеет вид:
>> tf(rw)
Transfer function:
-25 s - 4
---------------------
s^2 + 0.16 s + 0.0016
6. Дискретизация непрерывной модели СПС
6.1 Состав, структура и особенности цифровых систем управления
В подавляющем большинстве случаев управляющие устройства систем управления реализуются в виде электронных устройств, которые обеспечивают формирование управляющих воздействий в соответствии с требуемым алгоритмом управления. При реализации управляющих устройств систем управления существенную роль играет выбор электронной элементной базы. В настоящее время возможны два пути реализации электронных управляющих устройств – аналоговое управляющее устройство и цифровое управляющее устройство. В первом случае используются функциональные аналоговые устройства или устройства непрерывного действия, во втором – цифровые управляющие устройства или устройства дискретного действия.
Цифровым управляющим устройствам отдается предпочтение в силу ряда существенных преимуществ. Во-первых, следует отметить, что фундаментальные принципы управления остаются неизменными, т.е., цифровые системы управления могут быть построены по принципу разомкнутого управления, по принципу компенсации возмущений или по замкнутому принципу, в частном случае это могут быть системы регулирования с пропорциональным, пропорционально-дифференциальным или пропорционально–дифференциально–интегральным регулятором. Во-вторых, алгоритмы функционирования систем также не изменяются, так как цифровые системы могут быть стабилизирующими системами, программного управления, следящими системами и т.д. И, в–третьих, неизменными остаются показатели качества систем в статике и в динамике. Однако цифровые системы обладают рядом специфических свойств, которые необходимо учитывать при их аналитическом конструировании. Эти особенности цифровых систем в первую очередь связаны с цифровой формой представления сигналов и с тем, что цифровые управляющие устройства являются устройствами последовательного действия. Это означает, что вычисление значений управляющих воздействий занимает некоторое время, в отличие от систем с аналоговыми управляющими устройствами, в которых управляющие воздействия вычисляются непрерывно и теоретически мгновенно. Кроме того, в подавляющем большинстве случаев в реальных системах управления управляющее устройство является цифровым, а управляемый объект непрерывным, поэтому в реальных цифровых системах присутствуют сигналы как непрерывные, так и дискретные, что естественно вносит определенную специфику в их разработку на этапе аналитического конструирования.
Рассмотрим принципы квантования аналоговых сигналов. В целом в системах дискретного действия используется три вида квантования – квантование по уровню, квантование по времени и квантование по уровню и времени одновременно. При квантовании по уровню непрерывный сигнал заменяется суммой ступенчатых сигналов с высотой ступеньки, равной одному кванту q. При квантовании по времени непрерывный сигнал заменяется ступенчатыми функциями с высотой ступеньки, равной значению непрерывной функции в фиксированные равноотстоящие друг от друга на величину Т (период квантования) моменты времени. При квантовании по уровню и по времени одновременно непрерывная величина заменяется суммой ступенчатых сигналов с высотой и равной одному кванту, в фиксированные моменты времени, отстоящие друг от друга на величину периода квантования Т. Далее квантованный сигнал преобразуется в зависимости от вида дискретной системы в другие формы. Так, в импульсных системах квантованный сигнал может быть преобразован в импульсную последовательность с амплитудно-импульсной, широтно-импульсной или частотно-импульсной модуляциями. В цифровых системах применяется смешанный способ квантования, при этом квантованный по уровню сигнал представляется в виде цифрового кода, значение которого равно количеству квантов, укладывающихся в квантованный сигнал в данный фиксированный момент времени. Максимальное число квантов для конкретного типа АЦП является числом фиксированным и определяется разрядностью АЦП. Так, при разрядности АЦП n=8 максимальное число квантов N= 255=(2n
-1). Значение кванта вычисляется по максимально допустимому значению входного сигнала АЦП Umax
и его разрядности
 . .
6.2 Выбор разрядности АЦП
Разрядность АЦП практически не влияет на динамику процессов и сказывается на точности системы, которая определяется по значению установившейся ошибки. Поэтому мы можем определить разрядность АЦП по заданной точности системы. Так как по техническому заданию значение допустимой ошибки не более ε ≤ 0,5[%], то величина кванта по уровню определяется следующим образом:
 , тогда допустим, что , тогда допустим, что  = 1 В, ε = 0,5% => ε = 0,005 В = 1 В, ε = 0,5% => ε = 0,005 В  , тогда количество квантов , тогда количество квантов 
6.3 Расчет периода квантования для цифровой системы по условиям ее устойчивости
Определим период квантования по времени нарастания tн
переходной характеристики.

В данном случае  : :

Из теории регулирования непрерывных систем известно, что

Уточним период квантования по теореме Котельникова:

Из полученных различными способами значений периода квантования выбирается то значение, которое удовлетворяет обоим случаям. В данной ситуации период квантования должен быть минимальным.
6.4 Исследование влияния периода квантования на устойчивость системы “в малом” и “в большом”
Структурная схема системы с цифровым устройством управления изображена на рис. 6.1.

Исследуем влияние периода квантования на устойчивость системы “в малом”. Подадим на вход системы управляющее воздействие, не выходящее за пределы линейной зоны нелинейного элемента, и построим переходные характеристики цифровой системы при различных значениях периода квантования.

Исследуем влияние периода квантования на устойчивость системы “в большом”. Подадим на вход системы управляющее воздействие, выходящее за пределы линейной зоны нелинейного элемента, и построим переходные характеристики цифровой системы при различных значениях периода квантования.

Рассмотрим систему, в которой коэффициенты были подобраны автоматически, с помощью специальных функций Matlab.
Подаем на вход системы управляющее воздействие, не выходящее за пределы линейной зоны нелинейного элемента.

Подаем на вход системы управляющее воздействие, не выходящее за пределы линейной зоны нелинейного элемента.

Заключение
В результате проделанной работы, было разработано управляющее устройство, обеспечивающее качественные показатели системы:
1. Минимальное время переходного процесса;
2. Точность поддержания выходной координаты в установившемся режиме менее 0.5%;
3. Характер переходного процесса монотонный.
4. Запас устойчивости в “малом” по амплитуде составляет 80 дБ (более 20 дБ), по фазе 62 (более (более  ); );
5. В полученной автоматической системе управления было применено цифровое управляющее устройство с 9-разрядным АЦП и определен допустимый период квантования сигналов, с учетом его влияния на точность и устойчивость системы.
|