| НВК №166 с лицеем “ВЕРТИКАЛЬ”
РЕФЕРАТ
на тему
ТРОСОВЫЕ СИСТЕМЫ В КОСМОСЕ
Выполнил Денисов Егор
Харьков 2001
ЧТО ТАКОЕ ТРОСОВАЯ СИСТЕМА
Космическая тросовая система - это комплекс искусственных космических объектов (спутников, кораблей, грузов), соединённых длинными тонкими гибкими элементами (тросами, кабелями, шлангами), совершающий орбитальный полет. В наиболее простом виде -это связка двух космических аппаратов, соединенных тросом длиной в десятки или даже сотни километров. Сложные тросовые системы могут иметь много космических объектов, соединенных тросами в форме замкнутых колец, древовидных образований, объемных многогранников. Космические тросовые системы - новые, нетрадиционные структуры, создаваемые человеком в космосе, - позволяют выполнять задачи, которые невозможно, нецелесообразно или неэкономично решать с помощью существующих средств космической техники.
Тросовые системы отличаются тремя основными особенностями от космических аппаратов традиционного типа. Первая - большая протяженность, обеспечивающая устойчивое вертикальное положение системы на орбите, причем на концах системы создается малая искусственная тяжесть. Соединенные тросом аппараты имеют недостаток или избыток орбитальной скорости, а их движение выполняется с одним периодом обращения на разных высотах. Вторая особенность - гибко изменяемая конфигурация, возможность изменения длины тросов путем их выпуска и втягивания.
Это позволяет регулировать взаимное положение и ориентацию аппаратов, присоединять и отцеплять другие объекты от тросов, передвигать по ним грузы. Третье отличие - активное взаимодействие электропроводного троса с внешней средой, в первую очередь, с магнитным полем и ионосферой Земли, обеспечивающее функционирование системы в генераторном, двигательном, электропередающем и излучательном режимах.
В зависимости от того, какая из этих особенностей преобладает у данной тросовой системы, какое свойство используется при эксплуатации, проекты таких систем можно разделить на три типа. У "статических" систем в процессе эксплуатации количество и длины тросов, количество и массы объектов, их взаимное положение и ориентация остаются постоянными. Ко второму типу относятся "динамические" системы, существенно изменяющие количество и длину тросов, количество и массу объектов, их взаимное положение и ориентацию. "Электромагнитные" системы снабжены электропроводными изолированными тросами с плазменными контакторами на концах и активно взаимодействуют с магнитным полем и ионосферой Земли.
Существует много различных проектов тросовых систем и способов их практического применения в космосе. Несколько лет назад нами была предложена классификация способов применения тросовых систем на низких околоземных орбитах по 3-м уровням: по типу используемой тросовой системы, по виду решаемой технической задачи и по конкретной реализации способа. База данных включает в себя около сотни известных способов и их возможных модификаций.
Статические тросовые системы могут использоваться в исследованиях дальнего космоса, околоземного пространства, атмосферы и поверхности Земли с помощью протяженных измерительных систем (например, интерферометров с очень большой базой, равной длине троса), датчиков геофизических полей, разнесенных или распределенных вдоль троса и опускаемых на тросе на низкие высоты атмосферных зондов. На космических аппаратах в составе таких систем можно проводить различные эксперименты и технические операции (медико-биологические исследования, производство веществ и материалов, выращивание растений) в специфических условиях микрогравитации (от тысячных до десятых долей g) и отсутствия собственной внешней атмосферы вокруг аппаратов. Используя архитектурный принцип построения тросовых систем, в космосе можно будет создавать сложные сооружения больших размеров, например, космические электростанции, поселения, заводы, оранжереи.
Динамические тросовые системы могут использоваться для выполнения орбитальных маневров космических аппаратов без затрат топлива - либо путем отведения аппарата на тросе с последующей его отцепкой, либо захватом и подтягиванием аппарата тросом. Например, если от орбитальной станции отвести вниз на тросе длиной около 50 км грузовой корабль и затем отделить его, корабль сойдет с орбиты и упадет на Землю, а станция повысит свою орбиту, не затрачивая на это ни капли топлива. На лифтах, движущихся по тросам, предполагается перемещать грузы и экипажи, а используя поворотную штангу с выходящим с конца тросом, ориентировать в пространстве висящий на тросе аппарат.
Электромагнитные тросовые системы могут вырабатывать за счет использования части кинетической энергии орбитального движения системы электроэнергию мощностью до 1 МВт. Электроэнергией, получаемой от бортового генератора, можно поддерживать или медленно повышать высоту орбиты тросовой системы без затрат топлива. Используя некоторые электродинамические эффекты, возможно с минимальными потерями передавать электроэнергию по длинному тросу между разнесенными космическими аппаратами. Трос в качестве передающей антенны позволяет осуществлять эффективное излучение радиоволн низкочастотных диапазонов - этот принцип найдет применение в глобальных системах космической связи.
Пожалуй, не существует такой области космической деятельности, где тросовые системы не могли бы найти эффективного применения. Более того, некоторые операции в космосе могут выполняться только при их использовании. Внедрение
технологии таких систем способно изменить весь облик будущих космических средств.
ОТ ЗАРОЖДЕНИЯ ИДЕИ ДО НАШИХ ДНЕЙ
Российские ученые заложили основы концепции тросовых систем как одного из перспективных направлений развития космической техники.
Впервые такие системы и способы их применения в космосе были описаны в 1895 г. К.Э. Циолковским в "Грезах о Земле и небе". Для создания искусственной тяжести К.Э. Циолковский предложил использовать вращающуюся связку обитаемой станции и балластной массы, соединенных цепью длиной 500 м, а для перемещения грузов в космосе - цепочку, выпускаемую и втягиваемую лебедкой.
В 1910 г. Ф.А. Цандер выдвинул проект "космического лифта" с 60 000-км тросом, протянутым с поверхности Луны к Земле. Под действием гравитационных и центробежных сил такой трос будет постоянно натянут, и по нему, как по канатной дороге, можно транспортировать грузы.
В 20-30-е гг. идеи К.Э. Циолковского нашли отражение в проектах вращающейся тросовой космической станции Ю.В. Кондратюка и в фантастических романах А. Беляева "Звезда КЭЦ" и "Прыжок в ничто". Идеи Ф.А. Цандера о космическом лифте были развиты в 60-70-е гг. в работах Ю.Н. Арцутанова, предложившего проект троса, протянутого с поверхности Земли на геостационарную орбиту и в проекте тросового "космического ожерелья Земли" Г.Г. Полякова.
В 1965 г. в РКК "Энергия" (бывшая ЦКБМ) под руководством С.П. Королева началась подготовка к первому в мире космическому эксперименту с тросовой системой. Разработанный проект "Союз-ИТ" предусматривал создание искусственной тяжести на космическом корабле "Союз", соединённом километровым стальным тросом с последней ступенью ракеты-носителя, путем приведения этой связки во вращение. Но после кончины С.П. Королева проект был закрыт, и работы по тросовым системам в РКК "Энергия" возобновились только через 20 лет.
Таким образом, в середине 60-х гг. наша страна лидировала по работам в области космических тросовых систем. Для дальнейшего развития этих работ имелись все предпосылки и условия. Однако в последующие годы из-за отсутствия заинтересованности руководства в продолжении этих разработок инициатива была перехвачена специалистами США.
ЗАРУБЕЖНЫЕ ИДЕИ И ЭКСПЕРИМЕНТЫ
Начало работ в области тросовых систем за рубежом связано с именем итальянского ученого Дж. Коломбо, разработавшего в 60-70-х гг. (совместно с работавшим в США итальянским специалистом М. Гросси) многочисленные проекты их практического применения в космосе и активно выступавшего за развитие такого направления. В частности, ими выдвинуты идеи электромагнитной тросовой системы и привязного атмосферного зонда, нашедшие в 90-х гг. практическое воплощение в итало-американских проектах "TSS-1" и TSS-2".
Реализации проектов "TSS" способствовала поддержка директора одного из подразделений NASA И. Беки, организовавшего в 1983 г. первую рабочую встречу специалистов по этой проблеме. После этого состоялись международные конференции по проблемам космических тросовых систем, проходившие в 1986 г. в Арлингтоне (США), в 1987 г. в Венеции, в 1989 г. в Сан-Франциско и в 1995 г. в Вашингтоне. На последней конференции выступили специалисты из США, Канады, Италии, Германии, Испании, Франции, Австрии, Японии и Китая.
В конце 1966 г. были проведены два американских эксперимента на пилотируемых кораблях "Джемини" - они соединялись 30-м синтетическими лентами с ракетной ступенью "Аджена". В первом эксперименте связка космических объектов вращалась вокруг общего центра масс, а во втором - в устойчивом вертикальном положении.
В рамках американо-японской программы в 1980-85 гг. были осуществлены четыре запуска на высоту 328 км зондирующих ракет. В ходе полета полезный груз удалялся на электропроводном тросе на 400 м (серия экспериментов "CHARGE"). В первых двух экспериментах тросы удалось выпустить только на длину 30 м и 65 м. В двух последних - тросы были выпущены полностью, что позволило выполнить исследования электродинамики тросовой системы.
Итало-американский эксперимент “TSS-1” был проведен в 1992 г. Предполагалось отвести от корабля "Атлантис" итальянский привязной спутник на электропроводном тросе длиной 20 км и выполнить электродинамические и радиофизические исследования. Привязной спутник разрабатывала итальянская фирма "Aeritalia" (Alenia Spazio), а привязную систему - американская фирма "Martin Marietta". Вследствие зажима троса в лебедке его удалось выпустить всего на 265 м, после чего трос был втянут обратно.
В феврале 1996 г. в ходе полета корабля "Спейс Шаттл" сделана попытка повторить такой эксперимент (TSS-R). Теперь трос размотали почти на всю длину, однако он неожиданно оборвался ("пережегся") из-за короткого замыкания, вероятная причина -механическое повреждение изоляции. Из-за аварии дорогостоящий итальянский спутник вместе с тросом ушел на другую орбиту и был потерян. Тем не менее, в экспериментах серии “TSS” была проведена часть запланированных электродинамических исследований, в частности, в эксперименте TSS-1R" в тросе был достигнут ток силой 0,5 А. Еще два американских
эксперимента "SEDS-1" и "SEDS-2" выполнены в 1993-94 гг. От последней ступени ракеты-носителя "Дельта-2" отводились полезные грузы на тросах длиной 20 км, выпускаемых с помощью катушек, разработанных американским специалистом Дж. Кэрроллом.
В первом эксперименте отрабатывался безрасходный спуск груза с орбиты, а во втором - развертывание тросовой системы в вертикальное положение. В 1993 г. также с использованием ракеты "Дельта-2" проведен эксперимент "PMG" с электропроводным тросом длиной 500 м, позволивший исследовать некоторые эффекты электродинамики данной системы.
Канадские эксперименты "OEDIPUS-A" и "OEDIPUS-C" с тросами длиной 1 км проведены в 1989 и 1995 гг. В мае 1996 г. состоялся запуск двух американских аппаратов морской разведки с тросом длиной 4 км (эксперимент "TIPS"). Программой длительного полета предполагается исследовать стойкость троса к воздействию метеорных частиц.
После проведения экспериментов "TSS-1" и "TSS-1R" (затраты составили почти миллиард долларов) пересмотрена программа работ США в области тросовых систем. Планировавшийся эксперимент "TSS-2" с атмосферным зондом, опускаемым вниз с корабля "Спейс Шаттл" на 100-км тросе, был отменен. А другие эксперименты в
космосе вначале были ограничены проектами, не превышающими по стоимости 10 млн. долларов, а затем вообще прекращены. В расписании полетов кораблей "Спейс Шаттл" до конца 2003 г. эксперименты с тросовыми системами не предусмотрены.
РОССИЙСКИЕ РАЗРАБОТКИ И ПРОГРАММЫ
В России были созданы научные школы, занимающиеся теоретическими исследованиями космических тросовых систем. С конца 60-х гг. эти исследования велись, главным образом, в Институте прикладной математики (ИПМ) АН СССР такими крупными учеными, как В.В. Белецкий, В,А. Сарычев, Е.М. Левин (ныне работающие за рубежом).Исследования механики тросовых систем давно ведутся в Московском государственном авиационно-технологическом университете (МГАТУ, бывший МАТИ) под руководством В.А. Иванова и Ю.С. Ситарского. В последние годы подобные исследования начаты в Московском авиационном институте, Московском государственном техническом университете им. Н.Э. Баумана, Военной инженерной космической академии им. Н.А. Можайского. Изучением электродинамики и радиофизики тросовых систем занимаются в ЦНИИ машиностроения, Институте радиотехники и электроники РАН, Московском физико-техническом институте.
В последние годы в НПО машиностроения совместно с Институтом земного магнетизма, ионосферы и распространения радиоволн разрабатывался проект эксперимента на станции "Алмаз", где предполагалось отвести на тросе платформу с аппаратурой для геофизических исследований. В НПО им. С.А. Лавочкина разрабатываются проекты марсианского тросового пенетратора на базе межпланетной станции "Фобос" и тросовой системы для обслуживания орбитальной станции на базе спутника "Прогноз". Институтом космических исследований РАН предложен проект тросовой системы в форме тетраэдра для исследования электрических и магнитных полей в околоземном пространстве. В Московском техническом университете связи и информатики ведутся исследования систем с "бегущими" тросами.
В последнее время проводится работа по тросовым системам с участием иностранных специалистов. В Самарском авиационном институте и Центральном специальном конструкторском бюро (ЦСКБ) совместно с немецкими фирмами ведется разработка проекта эксперимента с привязной капсулой "Rapunzel" на спутнике "Фотон". В ЦНИИМаш по гранту NASA разработан проект двойной электродинамической тросовой системы ТЭДОС на корабле "Прогресс-М".
В РКК "Энергия" во взаимодействии с европейскими специалистами разрабатывается проект возвращения баллистических капсул и грузовых кораблей с пилотируемой станции при помощи длинных тросов. В 1994 г. в сотрудничестве с немецкой фирмой "Kayser Threde" был создан проект совместного эксперимента "Tpoc-Rapunzel", затем по заказу Европейского космического агентства (ESA) прорабатывался эксперимент тросового спуска капсулы "Радуга".
ПЕРСПЕКТИВЫ ТРОСОВЫХ СИСТЕМ
В РКК "Энергия" активные работы по космическим тросовым системам возобновились в 1987 г. Они были направлены на освоение и применение таких систем в рамках пилотируемых космических станций. Разработанная концепция развития отечественных работ в этой области предусматривает следующее. На первом этапе - проведение на орбитальных станциях серии космических экспериментов с тросовыми системами "Трос-1", "Трос-1 А", "Вулкан" и 'Трос-2". В перспективе - создание и опытная эксплуатация на новой орбитальной станции тросовых систем транспортного, энергетического и исследовательского назначения. В отдаленном будущем предполагается создание орбитального пилотируемого комплекса с многофункциональным использованием технологий тросовых систем.
Космический эксперимент "Трос-1" - оригинальная отечественная разработка, выполняемая в РКК "Энергия" с 1989 г. Эксперимент предусматривает исследование механики развертывания, полет и разделение тросовой системы с отработкой безрасходного орбитального маневра. В программе "Трос-1" предполагалось создать на орбите тросовую систему, состоящую из станции "Мир" и корабля "Прогресс-М", соединённых 20-км тросом из синтетического волокна. В течение недели система совершит орбитальный полет, после чего будет осуществлено ее разделение. При этом корабль перейдет на более низкую орбиту, а станция увеличит высоту орбиты (такой маневр сэкономит около 150 кг топлива).
Эксперимент 'Трос-1 А" по своему замыслу аналогичен Трос-1 " и отличается от него увеличением длины троса до 50 км. Применение троса такой длины позволит без затрат топлива осуществить спуск грузового корабля с орбиты и его затопление в заданном районе Тихого океана. При этом орбитальная станция повысит высоту орбиты почти на 10 км, а экономия топлива составит до 400 кг.
В следующем эксперименте "Вулкан" предполагается развернуть на орбите модельный аналог электродинамической тросовой системы: из грузового корабля будет выдвигаться 100-м штанга с приборным контейнером на конце. Размещенная на корабле и в контейнере электронная аппаратура с плазменными контакторами сможет выполнить исследования электродинамических характеристик системы и различных явлений в магнитном поле Земли и ионосферной плазме. Кроме того, на борту орбитальной станции и на специально развертываемых наземных пунктах планируется принимать и анализировать излучаемые сверхнизкочастотные радиосигналы. В ходе 20-суточного полета пройдет отработка функционирования в генераторном, двигательном, элект-ропередающем и излуча-тельном режимах, а также управления ориентацией на орбите.
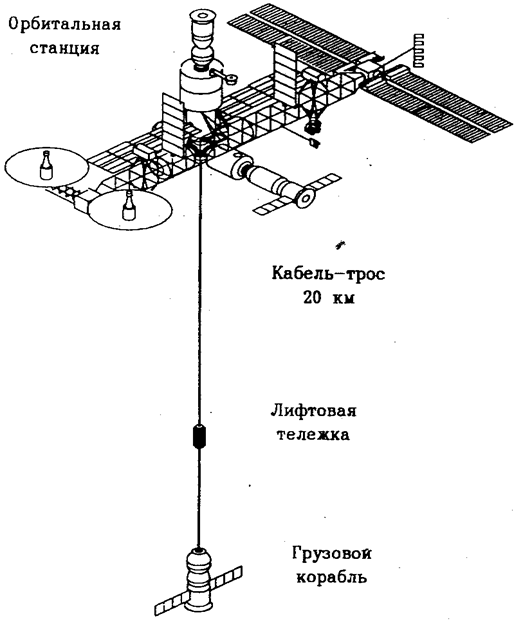
Заключительный эксперимент "Трос-2" задуман как комплекс всесторонних исследований механики, электродинамики и радиофизики орбитальной тросовой системы, состоящей из орбитальной станции и грузового корабля, соединенных 20-км кабелем, по которому движется лифтовая тележка. Размещенная на станции, корабле и тележке аппаратура позволит осуществить опытную эксплуатацию системы в различных режимах и провести уточненные исследования ее динамических и электромагнитных свойств. Орбитальный полет тросовой системы продлится не менее месяца, после чего, как в экспериментах "Трос-1" и "Tpoc-1 A", будет проведено ее разделение.
Успешное проведение экспериментов "Трос-1" и "Трос-1 А" то это позволит приступить к созданию и последующей эксплуатации на орбитальной станции транспортной тросовой системы многократного использования для спуска с орбиты возвращаемых капсул, отработавших кораблей и модулей, ферм и панелей. Эта же система применима и для периодического подъема высоты орбиты станции без затрат топлива. По предварительным проработкам, основой системы станет включаемый в состав станции специальный модуль. В его состав войдет лебедка для развертывания 60-км троса, механизм выдвижения и втягивания 100-м фермы и устройство захвата и сброса грузов.
После выполнения экспериментов "Вулкан" и "Трос-2" предполагается начать разработку штатно эксплуатируемой на станции тросовой системы. На конце длинного кабеля прикрепят солнечную или ядерную энергоустановку. Вырабатываемую электроэнергию от установки предполагается передавать по кабелю на станцию и использовать для энергообеспечения ее служебных систем и других размещенных на борту приборов. Кроме того, при двигательном режиме работы системы электрический ток в кабеле, взаимодействуя с магнитным полем Земли, позволит электродинамически поддерживать или медленно повышать высоту орбиты станции. Работа в генераторном режиме за счет частичного снижения орбиты системы даст возможность получать на станция за короткое время электроэнергию большой мощности.
В будущем как в экспериментах, так и при эксплуатации штатных систем можно будет проводить различные научные исследования с использованием возможностей, создаваемых развернутыми тросовыми системами. Большой интерес представляет изучение проблемы самочувствия и работоспособности экипажа орбитальной станции, а также поведения животных, роста растений, свойств твердых тел и жидкостей в условиях микрогравитации. Другой важный аспект - процесс естественного удаления собственной внешней атмосферы станции при развертывании тросовой системы. Это позволит получить особо чистый вакуум для выполнения некоторых исследований в области космической технологии. В полете тросовых систем можно измерять геофизические поля при помощи разнесенных датчиков, изучать свойства ионосферы, воздействуя на нее электромагнитным излучением тросовой антенны, выполнять и другие интересные исследования.
При успешном развитии работ по космическим тросовым системам, вероятно, в середине XXI в. может быть создана долговременная пилотируемая орбитальная станция нового поколения. Согласно предварительным проработкам, такая станция должна представлять собой сложную тросовую систему, состоящую из двух многоблочных станций, соединенных несколькими тросами, лифта (движущегося по тросам между станциями) и отводимых на тросах привязных модулей. Конечно, заглядывать в столь далекое будущее всегда рискованно, однако корпорацией "Энергия" уже получен патент на орбитальную станцию подобного типа.
КОСМИЧЕСКИЕ ТРОСОВЫЕ СИСТЕМЫ: ВЗГЛЯД ИНЖЕНЕРА И МЕХАНИКА
Что могут тросовые системы в космосе?
Тросовые системы в перспективе могут овладеть чрезвычайно широким набором "профессий" в космосе. Рассмотрим кратко схемы, обсуждаемые в литературе.
Как известно, искусственная тяжесть желательна для длительной работы экипажей в космосе. Для ее создания можно составить орбитальную станцию из двух отсеков, соединить их тросом и привести во вращение вокруг центра масс. В таком режиме двигалась связка "Джемини-1 1" с ракетной ступенью "Аджена". Угловая скорость ее вращения была в 13,5 раза больше орбитальной. Рассматривались и более сложные конструкции, состоящие из большого числа отсеков, соединенных тросами в многоугольные конфигурации .
Если связка вращается вокруг центра масс синхронно с орбитальным движением, то при ее ориентации вдоль геоцентрического радиуса-вектора (т.е. вдоль местной вертикали) возникает режим гравитационной стабилизации. В таком режиме двигалась связка "Джемини-12" с ракетной ступенью "Аджена". В этом движении искусственная тяжесть в отсеках складывается на 1/3 из приращения центробежных сил и на 2/3 из приращения гравитационных сил, что составляет в сумме ^g=(3*DR/R)g,
где DR
— вертикальное смещение относительно центра масс,R — геоцентрический радиус орбиты центра масс. g —
ускорение свободного падения на данной высоте. Искусственная тяжесть, составляющая даже малые доли g
(микротяжесть ^g),
позволяет улучшить условия жизни на орбите: избавиться от плавающих предметов, облегчить обращение с водой и т.д. Условия микрогравитации благоприятны для перекачки жидкостей на орбите (например, топлива) из одного резервуара в другой. В условиях невесомости дозаправка топливом на орбите является сложной технологической проблемой, так как по мере опорожнения резервуара общая масса жидкости под действием поверхностного натяжения разбивается на множество капель, собрать которые не так-то просто. В условиях микрогравитации жидкость будет перетекать из одного резервуара в другой по простому закону сообщающихся сосудов, который в равной степени справедлив как для полной тяжести g,
так и для микротяжести g.
Представим, что в вертикальной конфигурации один из отсеков является резервуаром с топливом . Пристыковавшись к этому отсеку, межорбитальный буксир или орбитальный самолет сможет дозаправиться простейшим способом, открыв вентиль и использовав перетекание топлива из сосуда с большим уровнем в сосуд с меньшим уровнем. Минимальная длина троса, которая обеспечивает уровень микрогравитации, достаточный для преодоления поверхностного натяжения, составляет для разных видов топлива от 30м до 1,2 км . Трос может быть достаточно тонким: сечение менее 1 мм^2, погонная масса ~ 1 кг/км. Разнесение отсека с топливом и жилого отсека станции на разные концы троса повышает также безопасность и работоспособность станции в аварийных ситуациях.
За пределы станции может быть вынесен не только резервуар с топливом. Вынос узла для пристыковки орбитального самолета позволяет существенно уменьшить толчок, который испытывает станция, и достигнуть заметной экономии топлива .
Схема гравитационно стабилизированной связки находит и другие применения. В рассмотрен проект интерферометра, состоящего из двух приемных антенн, соединенных тросом длиной 5 км и расположенных вдоль геоцентрического радиуса-вектора. Большая база орбитального интерферометра и, следовательно, его большая разрешающая способность позволяют проводить тонкие радиоисследования Солнца и планет, в частности на тех длинах волн, которые не пропускает земная ионосфера.
Существует проект пассивного спутника-радиоотражателя на геостационарной орбите, который представляет собой цепочку большого числа металлических шариков, соединенных стерженьками с шарнирами и расположенных радиально, и может быть элементом разветвленной системы радиосвязи. На низших формах колебаний такая цепочка шариков ведет себя, как гибкая нить.
Трос, расположенный вдоль местной вертикали, может служить основным несущим элементом для различных вариантов солнечных космических элекстростанций. Конструкция такой электростанции состоит из большого числа коллекторов солнечной энергии, расположенных вдоль троса длиной 50 км. Коллекторы могут быть выполнены в форме пластин, цилиндров или шаров. Вырабатываемая солнечной электростанцией энергия будет передаваться на Землю с помощью СВЧ-антенны, расположенной на конце троса, обращенном на Землю. Движение всей системы происходит в режиме гравитационной стабилизации .
Обсуждаются способы полезного использования солнечного излучения в космосе с помощью пленочных отражателей. В предлагаемых конструкциях существенными элементами являются тросы-стропы, за счет которых осуществляется управление ориентацией и формой отражающей поверхности.
Значительный интерес представляют тросовые системы, взаимодействующие с магнитным полем Земли. Если электропроводящий и изолированный снаружи трос развернуть с орбитальной станции вдоль местной вертикали и с помощью бортовой энергоустановки пропустить по нему электрический ток то со стороны геомагнитного поля на трос будет действовать распределенная сила, ускоряющая движение станции. Трос в этом случае будет действовать, как своего рода электромагнитный двигатель для станции. Ток, протекающий по тросу, должен замыкаться через ионосферную плазму; контакт с плазмой осуществляется специальными устройствами, через которые на одном конце троса электроны стекают в окружающую плазму, а на другом конце собираются из плазмы.
Проводящий трос можно использовать не только как двигатель, но и как генератор электрической энергии. При движении троса, снабженного на концах устройствами контакта с плазмой, в магнитном поле в тросе будет индуцироваться электродвижущая сила. Если между тросом и одним из устройств контакта с плазмой поместить электрическую нагрузку, то на ней будет производиться полезная работа. Сила, действующая на трос со стороны магнитного поля, в этом случае будет тормозить движение станции.
По предварительным оценкам, коэффициент полезного действия такого электрогенератора очень высок- около 90%. За счет большой скорости движения троса э.д.с. индукции будет составлять на высоте 400 км около 2000 В/км. При длине троса 10—20 км разность потенциалов между его концами составит 2—4 кВ, сила гока будет измеряться амперами, мощность генератора может достигнуть нескольких десятков киловатт. Уменьшение высоты орбиты в процессе генерации электроэнергии может компенсироваться тягой реактивных двигателей, что дает высокоэффективный способ перевода химической энергии в электрическую.
Выгодной выглядит комбинация режимов тяги и генерации. При входе станции в тень Земли се солнечные батареи перестают вырабатывать энергию. В этот период движения электроэнергия на борту станции может вырабатываться тросовым генератором за счет уменьшения энергии орбитального движения. При выходе на освещенную сторону Земли часть электроэнергии, вырабатываемой солнечными батареями, нужно будет использовать для работы троса как двигателя с целью восполнения энергии орбитального движения. Возможность запасения энергии в виде энергии орбитального движения и высвобождения ее с малыми потерями с помощью тросового мотор-генератора представляется очень заманчивой. Если на станции для тех или иных целей необходима кратковременная генерация пиковой электрической мощности, тогда в течение многих витков трос работает как двигатель и станция набирает высоту, затем в нужный момент трос переключается на генерацию и за несколько витков переводит запасенную
энергию орбитального движения в электроэнергию за счет уменьшения выcoты полета станции.
Пропуская ток по тросу в фазе с изменением положения станции на орбите, можно изменять все элементы орбиты без затрат химического топлива что даёт новый и весьма экономный способ маневрирования на орбите. Описанную электромагнитную тросовую систему можно использовать также для приема и генерации радиоволн и экспериментов с ионосферной плазмой.
Важным для практики применением тросов в космосе является исследование верхней атмосферы Земли. Атмосфера на высоте 100 км недоступна для непосредственного исследования ни с самолетов, ни для спутников. Для полета самолетов эти слои слишком разрежены, а для спутников — слишком плотны. Зондирующие ракеты могут находиться в этих слоях лишь незначительное время. Рассмотрим привязной спутник для негодования атмосферы. Трос длиной около 100 км соединяет спутник-зонд с орбитальным самолетом. Орбитальный самолет летит на высоте 200—250 км над поверхностью Земли и буксирует спутник-зонд на высоте 110—130 км. Такой полет может продолжаться довольно долго. Кроме измерения параметров атмосферы на этих высотах возможно также определение аэродинамических характеристик различных моделей, выпущенных со спушика-зонда. Это дает уникальную возможность экспериментального изучения входа в атмосферу перспективных моделей космических аппаратов. Поэтому эту систему называют также "высотной аэродинамической трубой".
С низколетящего привязного спутника-зонда можно получать снимки Земной поверхности с заметно лучшим разрешением, чем с обыкновенного спутника. Причем можно делать стереоскопические снимки, когда одно изображение получается с зонда, а другое — с орбитального самолета. Спутник-зонд является также средством для тонкого исследования гравитационных и магнитных аномалий и определения коэффициентов при старших гармониках в разложении соответствующих потенциалов.
Для первых экспериментов с атмосферной и электромагнитной ТС на базе орбитального самолета предполагается использовать многослойные тросы толщиной 1—3 мм и погонной массой в пределах 1—10 кг/км.
Выгодным представляется использование тросов для различных транспортных операций в космосе. При традиционном способе межорбитальных перемещении рабочее тело, выброшенное из сопла реактивного двигателя, безвозвратно теряется. С помощью длинных тросов можно образовывать временные связки спутников и изменять их орбиты, передавая без потерь энергию и момент количества движения от одного спутника к другому, т.е. используя один из спутников в качестве реактивной массы. Как показывают расчеты, при рациональной комбинации таких операций с включением реактивного двигателя или электромагнитного тросового двигателя можно достигнуть существенной экономии топлива.
Рассмотрим схему запуска спутника с орбитального самолета с помощью троса. Трос осуществляет передачу спутнику части энергии и момента количества движения орбитального самолета. Это приводит к увеличению апогея орбиты спутника и уменьшению перигея орбиты самолета, в частности орбитальный самолет может выйти на траекторию входа в атмосферу и возвращения на Землю. При отделении последнего топливного бака от орбитального самолета бак не просто сбрасывается, а спускается на длинном тросе, передавая часть своей энергии и момента количества движения орбитальному самолету и увеличивая тем самым апогей его орбиты. Потерявший скорость топливный бак входит в атмосферу и сгорает. По проведенным оценкам, такая схема сброса бака позволит увеличить грузоподъемность орбитального самолета на 1 ,5 тонны без дополнительных затрат топлива.
Использование длинного троса позволяет осуществить торможение орбитального самолета без затрат топлива. Для этого с орбитального самолета на тросе в верхние слои атмосферы спускается баллон, который испытывает значительные аэродинамические сопротивление. Натяжение троса передает эту тормозящую силу орбитальному самолету. После достаточного для посадки снижения скорости баллон отцепляется и сгорает в атмосфере. При использовании крыла вместо баллона можно изменять плоскость орбиты орбитального самолета, если крыло движется не в плоскости орбиты, а с боковым смещением, меняющимся в резонансе с орбитальным движением. Эта операция образно сравнивается с хождением под парусом, только парус оказывается отнесенным от корабля на 100 км!
Интересный способ маневрирования на орбите возникает при периодическом изменении длины троса в резонансе с орбитальным движением. Это приводит к вековой эволюции (правда, очень медленной) орбиты центра масс связки. Если учитывать сплюснутость Земли, то аналогичный эффект наблюдается и при изменении длины троса на удвоенной орбитальной частоте.
"Космический эскалатор"
. Он состоит из нескольких ступеней - радиальных связок. Запускаемый на высокую орбиту спутник подлетает к нижнему концу каждой связки и по тросу перетягивается на ее верхний конец, затем перелетает к следующей связке и таким образом может быть доставлен, например, на геостационарную орбиту. Постепенное снижение орбит связок, образующих ступени космического эскалатора, может компенсироваться путем использования тросов как электромагнитных двигателей, а также частично за счет встречного потока полезных грузов, возвращаемых с высоких орбит на Землю. По имеющимся оценкам, космический эскалатор позволяет добиться заметной экономии топлива.
Более реальным, чем земной, представляется лунный "космический лифт". В своем движении вокруг Земли Луна остаётся все время повернутой к Земле одной и той же стороной. Это обстоятельство позволяет прикрепить, например, к обратной стороне Луны космическую станцию на тросе, вытянутом вдоль линии Земля - Луна. Эта система, по существу, представляет собой вариант радиальной связки. Её необычность состоит в том, что одним из тел, соединённых тросом, является естественное небесное тело. В отличие от земного космического лифта трос для лунного лифта, изготовленный из современных высокопрочных материалов, может иметь весьма скромные характеристики (средняя погонная масса ~1 кг/км, сечение ~1 мм^2). Привязной спутник Луны может быть использован не только для обмена грузами с поверхностью Луны. Факт удержания космической станции за обратной стороной Луны вблизи коллинеарной точки либрации L2
системы Земля — Луна имеет и самостоятельное значение. Как известно, движение свободного космического аппарата вблизи точки L2
неустойчиво. Вопросам активной стабилизации движения космического аппарата в окрестности точки L2
посвящено большое количество работ. В то же время спутник, привязанный тросом, в окрестности точки L2
не требует никакого управления: его стабилизация имеет пассивный характер.
Подъем грузов с поверхности Луны может осуществляться не только с помощью стационарно закрепленной тросовой системы. Подъём грузов с помощью вращающейся связки двух спутников. Вращательное и орбитальное движения связки подобраны так, чтобы в периселении один из спутников подходил к поверхности Луны с нулевой относительной скоростью и захватывал груз. В апоселении груз отцепляется и выводится на окололунную орбиту. Трос в этой связке должен иметь длину несколько сотен километров.
Высказана оригинальная идея использования естественных спутников Марса — Фобоса и Деймоса - в качестве основы для "космического эскалатора". Для этого с Фобоса и Деймоса в направлении к Марсу и от Марса выпускаются тросы длиной несколько тысяч километров. Такая возможность, как и в случае Луны, обусловлена неизменной ориентацией этих спутников в орбитальных осях, а также слабостью их собственного гравитационного поля. Спутник, поднимающий грузы с поверхности Марса, сначала прибывает на нижний конец тросовой системы Фобоса, затем передвигается вдоль троса на ее верхний конец и перелетает на нижний конец тросовой системы Деймоса. С ее верхнего конца спутник выходит уже на траекторию межпланетного перелета. Система тросов из кевлара погонной массой ~20 кг/км
и общей массой ~300 т дает экономию 10 т топлива на каждом запуске 20 т полезной нагрузки. Конечно, "марсианский эскалатор" —дело завтрашнего дня. Однако уже сегодня марсианская автоматическая станция может быть оснащена зондом, выпускаемым на тросе на удаление 50 км от основного спутника для измерения градиентов параметров плазмы и магнитного поля. С той же целью с посадочного аппарата на Фобосе можно развернуть гирлянду датчиков, соединенных последовательно тросами суммарной длиной 50-60 км при массе не более 1 кг.
Сцепление космического аппарата тросом с малыми телами Солнечной системы авторы предлагают использовать для изменения траектории при близком прилете. Собственное гравитационное поле небольшого астероида недостаточно для совершения гравитационного маневра, но если "загарпунить" астероид с пролетающего космического аппарата, то сила натяжения троса с успехом заменит силу притяжения. После совершения маневра трос отцепляется и остается "на память" астероиду.
Как уже отмечалось, современные материалы не позволяют сделать земной космический лифт с приемлемыми характеристиками. Однако можно сделать его "половину", т.е. протянуть трос от геостационарной орбиты не до самой поверхности Земли, а лишь на половину этого расстояния. Речь идет о геосинхронной радиальной связке, в которой верхний спутник находится несколько выше геостационарной орбиты, а нижний спутник находится посредине между геостационарной орбитой и Землей. Соединительный трос из высокопрочных материалов может иметь в этом случае приемлемую погонную массу ~1 кг/км (сечение ~1 мм^2). Привлекательной в этом проекте является возможность иметь геостационарный спутник на высоте, вдвое меньшей высоты геостационарной орбиты.
Для индустриализации космоса могут потребоваться большие производственные комплексы. На рис. Такой комплекс в виде кольца из большого числа производственных, исследовательских и жилых модулей, соединенных последовательно тросами. Такое соединение позволяет расположить модули на близком расстоянии друг от друга, что невозможно в свободном полете из-за неизбежного рассогласовагия скоростей и относительного дрейфа соседних модулей, приводящего к их столкновению. В устойчивом кольце связанных тросами спутников такой дрейф не происходит.
Имеются и менее грандиозные проекты локальных "созвездий" спутников и космических платформ, стабилизируемых в вертикальном направлении гравитационным градиентом, а в горизонтальном направлении - вращением или разностью аэродинамических сил.
Этот список можно еще продолжить. Тем более, что обсуждение каждого варианта применения тросовых систем в космосе рождает новые варианты: заряд "тросовых" идей еще далеко не исчерпан. Конечно, не все они равнозначны по предоставляемым выгодам, затратам и срокам на реализацию. Так, перспектива применения тросовых систем представляется более отдаленной, чем применение систем с электромагнитным взаимодействием троса или системы с атмосферным зондом. Тем не менее исследование динамики этих систем наряду с системами ближайшей перспективы ни в коей мере не является преждевременным. Более того, оно необходимо для глубокого и всестороннего понимания реальных возможностей использования тросов в космосе и создания более полного динамического Портрета этого нового класса космических систем.
Применение тросовых систем в аэростатах с выносным баллонетом
Аэростат с выносным баллонетом
Рассмотренные выше способы и устройства регулирования высоты аэростатов и дирижаблей требуют для своей практической реализации значительных затрат энергии из бортовых источников, если только это не простейшая операция: сброс балласта для подъема либо выпускание газа для спуска. Многократные операции «спуск — подъем» легче проводить на больших дирижаблях с достаточно мощной бортовой энергетикой, чем на автоматических аэростатах малой грузоподъемности. Это приводит к необходимым поискам других, менее энергоемких способов регулирования высоты. В то же время проблема энергоисточников с высокими удельными показателями остается самостоятельной задачей.
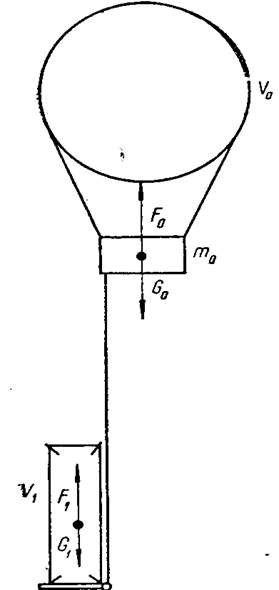
Рассмотрим способ регулирования высоты аэростата при помощи выносного баллонета. Физической основой существования такого способа является наличие градиента плотности газа в атмосфере любой планеты. Сущность способа легко понять из схем, представленных на рисисунках.
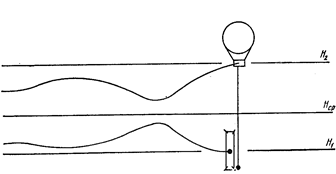
В гондоле аэростата-носителя с объемом оболочки v0 размещается лебёдка, на барабан которой намотан трос длиной Lтр. На конце троса прикреплена другая гондола с оболочкой V1.Обозначим вес аэростата-носителя Go, вес выносного малого аэростата (выносного баллонета) g1. В первый момент вся система находится на некоторой равновесной средней высоте Нср. или высоте исходного дрейфа (рис.). Затем оболочку V1 начинаем опускать на тросе, что нетрудно выполнить, поскольку подъемная сила F1 в этот момент меньше веса G1 выносной конструкции с баллонетом.
На некоторой высоте Н срабатывает система заполнения объема баллонета подъемным газом, появляется подъемная сила f1. По мере спуска плотность атмосферы увеличивается, следовательно, возрастает подъемная сила F1, компенсирующая часть веса, и аэростат-носитель поднимается вверх. Регулирование высотой выносного баллонета позволяет регулировать высоту основного аэростата-носителя, брать пробы газа аппаратурой, установленной в гондоле баллонета, а перегревшуюся гондолу с научной аппаратурой периодически поднимать для охлаждения в верхние, более холодные слон атмосферы. Представляет интерес исследовать возможность оригинального решения проблемы энергоснабжения аппаратуры аэростата-носителя за счет аккумулирования тепла при опускании выносного баллонета в горячие слои атмосферы, отдачи тепла и его преобразования в тепловой машине в верхних слоях атмосферы. Однако все это требует определения весовых соотношений элементов данной системы.
При расчете наиболее простым является случай, когда объем выносного баллонета постоянный, т. е. V
= const. Однако реализация этого варианта выполнения баллонета весьма затруднительна. Поэтому рассмотрим случай, когда постоянной является масса газа в объеме выносного баллонета, т. е. Т1= const.
Будем считать, что вес гондолы и конструкции основного аэростата Go, объем Vо = const обеспечивает подъемную силу I Fcp, которая удерживает всю систему в начальный момент на уровне исходного дрейфа Нср. Объем троса не сказывается на величине силы Fcp. В качестве подъемного газа в обеих оболочках используется водород. При принятых обозначениях и заполненном (выполненном) баллонете на высоте Hср уравнение равновесия сил, действующих на систему в проекции на вертикальную связь, запишем в виде
G1+G0=Fcp+F1(H), (IV. 12)
где Fcp = [pa (Н) — рв]ср Vog (Н) — архимедова сила на уровне исходного дрейфа; F1(Н) = [рa (Н) — рв]1 V1 g (Н) — архимедовa сила выполненного баллонета; ра(Н)=р (Н)/RаT (Н), рв=p(H)/RвТ(H)—плотность газа соответственно атмосферы и водорода в баллонете.
В случае, когда в выносном баллонете постоянной является масса подъемного газа, при анализе изменения подъемной силы следует учитывать, что во время спуска в нижние слои выносной баллонет силами внешнего давления будет изменять свой объем. Обозначим объем заполненного баллонета на высоте, где его подъемная сила равна общему весу конструкции G1, через V1
.
Этот объем должен быть минимальным, поскольку при подъеме вверх расширение газа не должно привести к разрыву оболочки баллонета. Следовательно, на некоторой наименьшей высоте Н
объем баллонета равен V1.
Газ внутри него имеет одинаковые с внешней средой температуру и давление, т. е. находится с ней в термодинамическом равновесии. Исходя из этих предпосылок рассчитаем параметры баллонета. Подъемная сила баллонета
F1=V1[p
a
(H)-p
в
]g(H).
(IV. 13)
Вес всей выносной конструкции слагается из веса научной аппаратуры G2, оболочки баллонета G3 и подъемного газа G4 т. е.
С1=С2+Сз+С4. (IV. 14)
В положении равновесия F1 = G1, или
V1 [p1a(H)–p1в]g(H)=(m2 + m3 + m4) g (H). (IV. 15)
Поскольку V1 = m4/р1в, уравнение (IV. 15) запишем в виде
P1a(H)/p1в-2=m2/m4+m3/m4 (IV 16)
Масса научной аппаратуры остается неизменной, т. е. m2/m4 =
const, поэтому, варьируя отношения p1a(Н)/р1в и m3/m4, можно выбирать необходимые параметры, задавая другие. Однако следует отметить следующее обстоятельство. При подъеме вверх выносного баллонета аэростата-носителя, переходящего при этой вариации на некоторую высоту Hср, газ в баллонете будет расширяться до объема V
2
.
Чтобы стенки не были напряженными, у баллонета должен быть предусмотрен избыточный объем, т. е. V
2
> V
1.
При постоянной массе газа m4 его объем при термодинамических параметрах высоты Hср. составит:
V2 =m4/pср. Rв Tср. Следовательно, увеличение объема определяется выражением
Dv=v2-v1=m4Rв (IV. 17)
Это, в свою очередь, приведет к увеличению веса оболочки на величину DGз. Если массовая плотность материала оболочки постоянна и равна рк, то, представляя баллонет в виде кругового цилиндра, добавку веса дополнительного объема можно определить как
DGз=pdLdpкg (1 V. 18)
где L—
высота дополнительного цилиндрического объема; в — толщина материала оболочки; d —
диаметр цилиндра.
Поскольку для кругового цилиндра Dv =pd^2/4L,
выражение (IV. 18) можно преобразовать к виду
DGз=4dpкDvg/d. (IV. 19)
Таким образом, с учетом увеличения веса оболочки необходимо в уравнении (IV. 16) массу оболочки записывать как сумму масс оболочки для положения равновесия и величины m3=DGз/g. Однако увеличение массы (соответственно веса) оболочки приведет к необходимости уменьшения величины m2/m4 если высоту нижнего равновесия оставим прежней. В противном случае для определения параметров баллонета следует использовать методы последовательного приближения.
Т а б л и ц а 5
| Показатель
|
Высокомодульные волокна
|
Стальная проволока
|
Капрон
|
| Прочность на разрыв, Па
|
(2¸З)*10^9
|
3*10^9
|
3,2*10^9
|
(3,2¸4)*10^9
|
—
|
| удлинение, %
|
2—4
|
1—4
|
1—3
|
—
|
8—15
|
| Модуль упругости, Па
|
(I0/15)* 10^10
|
(11/15)* 10^10
|
(6/7.5)*10^10
|
(5/5.5)*10^10
|
—
|
| Плотность, кг/м'
|
1300—1430
|
1350
|
2550
|
7800
|
1350
|
| Число двойных изгибов, цикл
|
3000
|
—
|
200—250
|
20
|
8000— 12000
|
| Рабочая темпе-ратура, К
|
523
|
573
|
773
|
773
|
393
|
Исходя из необходимости первоочередного исследования облачного покрова планеты, выносной баллонет должен Опускаться до высоты (30¸40)*10^3м. В диапазоне высот (30¸56)-10^3 м ветры имеют различную скорость, перепад температур достигает 130 °С, плотность и вязкость среды также изменяются. Все эти факторы приводят к тому, что выносной баллонет становится своеобразным аэродинамическим тормозом, увеличивающим усилие, действующее на трос. В случае, если на этих высотах будут развиваться турбулентности и порывы ветра, у системы баллонет — носитель появится путевая раскачка. Возможны и продольные (по высоте) колебания, увеличивающие нагрузку на тросовую подвеску. Однако, как было показано выше, такие колебания в довольно плотной атмосфере Венеры быстро затухают. Характеристики прочностных свойств тросов из различных материалов приведены в табл. 5. Видно, что наибольший интерес представляют высокомодульные волокна, которые по всем параметрам могут обеспечить подвеску баллонета на длине троса примерно 20*10^3 м.
Для определения предельной длины троса в системе носитель — баллонет находим максимальное напряжение в сечении троса, когда отсутствуют рывки и подъем груза вверх равномерный. Наиболее напряженным является сечение в начале троса. Сила, действующая на трос, слагается из веса выносного баллонета G1, веса сматываемого троса Gтр, подъемной силы баллонета F1, возрастающей при подъеме на величину инерционной силы Fин и силы аэродинамического сопротивления FR.
Таким образом, при спуске действующая на трос сила описывается выражением Fтр=G1+Gтр-F1.
(IV.21)
где Gтр = ртрLтрSтр; F1=V1[p1a(H)–p1a]g(H), напряжение в этом случаеcxv^2
s= G1+Gтр-F1/Sтр (IV.22)
Здесь Sтр- поперечное сечение троса; ртр —плотность материала троса.
При подъеме с ускорением а
инерционная сила Fин=а(m1+mтр); аэродинамическое сопротивление FR=0,5Cx v
^2pa(H)S, где S — поверхность выносного баллонета; v —
скорость подъема.
Следовательно, в момент ускоренного подъема напряжение в наиболее опасном сечении троса
s= G1+Gтр-F1+Fин+FR/Sтр (IV.23)
Предельную длину троса для квазистатического состояния подвески можно определить из уравнения (IV.22)
Lтр=1/pтр*(s-G1/Sтр+F1/ Sтр).
Для определения возможностей аэростата с выносным баллонетом произведём численные оценки параметров системы. Допустим, что вес G1= 1000 H. Глубина погружения (нижний уровень) H1=30*10^3 м, уровень дрейфа аэростата-носителя Hср = 50*10^3 м. Определим параметры системы, если оболочка выносного баллонета выполнена из пластика толщиной 40*10:-6 м, плотностью 2*10^3 кг/м^3; диаметр оболочки в = 1 м.
Параметры атмосферы Венеры: 1) для высоты Hср = 50х10^3 м температура Тcр = 350 К, давление рср=1,275 х10^5 Па, плотность рср а(H)=1,932 кг/м^3, рв=8,844х10^-2 кг/м^3; 2) для высоты H1 = 30*10^3 температура T1=492 К, давление p1 == 9,35*10^5 Па, плотность p1a(Н)=9,95 кг/м^3, р1в == 4,61*10^-1 кг/м^3. Газовая постоянная водорода Rв == 4118,8 Дж/(кг*К). Ускорение свободного падения g (Н) = 8,87 м/с^2.
Расчет параметров баллонета
. Исходя из принятых данных, объем баллонета в равновесии V1 = F1/[p1a(Н)-p1в]g(Н) = 11,9 м^3; масса водорода в баллонете m4=V1p1в = 5,485 кг; дополнительный объем Dv=m4Rв х (Tcp/pcp-T1/p1)=50,1 м^3; общий объем баллонета V2=V1+Dv =62 м^3; масса m3=(pd^2/2+4v1/d)spк=3,9 кг; масса дополнительного объема Dm3=4spкDv/d=16,1 кг. Следовательно, Dm3+ m3=20 кг.
Из уравнения (IV. 16) следует, что безразмерная масса научной аппаратуры и гондолы не должна превышать величины
m2/m4=p1a(H)/ p1в-2-(m3+Dm3)/m4
Практически во всем диапазоне высот в атмосфере Венеры отношения плотностей атмосферы и водорода p1a (H)/ p1в =21,5 с точностью до десятых. Следовательно, m2/m4=19,5-(Dm3+ m3)/m4 откуда m2/m4=15,9; масса научной аппаратуры m2=15,9 m4=87 кг. Таким образом, общая масса выносного баллонета m1=m2+m3+m4»112,5 кг.
Начальное условие G1 == 1000 Н дает массу m1G1/g (Н)=112,7 кг, расхождение с вычисленной составляет 0,2 кг (1,77 Н), или 0,2% заданного значения силы F1.
Расчет параметров аэростата-носителя. Для численных оценок принимаем: начальная масса собственно аэростата-носителя m0=100 кг; общая масса системы m0+m1=
212,7кг (или вес системы G0+G1=1887 Н). Следовательно, объем оболочки на Hср=50-10^3 м составляет: V0=Fср/[pа(Н)-pв]срg(Н)=115,4 м^3.
Если объем сферический, то его радиус rs»3м. Массовая плотность собственно аэростата-носителя ран=m0/v0=0,866 кг/м^3.
|